

HOW TO SET UP AN FPV QUADCOPTER
In part 1 of this build, we connected the ESCs, Naze32 and buzzer to the mini power distribution board and mounted the motors. Part 2 we will set up the Naze32, program the transmitter and install the FPV camera and transmitter.
First thing we’ll do is set up a new model on the Taranis X9D. See video above on how to do that.
 Then we’ll bind the D4R-ii RX to the Taranis X9D.
Then we’ll bind the D4R-ii RX to the Taranis X9D.
- On page 2/13 in the Taranis, scroll down to “Mode” and change it from D-16 to D-8.
- Select “Bind” on the Taranis and it will start beeping.
- On the RX, hold the F/S button while powering up the RX.
- Release the button and disconnect power. When you power back up the LED on the RX will be green and you’re done.
If you are using the CC3D flight controller, you can use this guide for the setup.
Base flight and the Naze32
This will be a quick and simple setup. If you want a super detailed explanation on the Naze32 check out this video.
Follow the instructions below to get Baseflight:
- Download and install Chrome
- Add Baseflight
- Download and install the CP210X VCP Driver for your computer system.
On the setup page, leave your quad completely flat and click “Calibrate Accelerometer”

On the Configuration tab:
- If you are using a receiver that supports PPM, check “Enable PPM”. If you are using a regular RX don’t check this box.
- Enable Battery Voltage Monitoring if you have a buzzer hooked up.
- If you want, enable “Don’t spin the motors when armed”
- If you are using a Taranis set “Minimum Throttle” to 1000 and “Maximum Throttle” to 2000.

The Minimum Cell Voltage is the threshold for the buzzer alert. These numbers are per cell. So for a 3 cell battery set at 3.4v, your buzzer will go off at 10.2v. Default setting is 3.3v so your alarm won’t go off until 9.9v. That’s a bit low for a LiPo battery. If you over-discharge a LiPo battery it will shorten the life of the battery.
I have the Naze32 mounted where the arrow points to the right so I had to adjust the Yaw Adjustment to 90. If you mount your Naze32 to any other direction than the arrow pointing to the front, see this link for your correct Naze32 board alignment.
We’ll skip the PID tab for now, I’ve got a whole post on how to tune PIDs coming later.
Receiver Setup

Plug in your motor and turn on your TX. If your TX controls don’t correspond to what shows in Baseflight, change the Channel Map to TAER1234.
Motor Testing


*Make sure you do this with your PROPELLERS OFF
Plug in your battery, check the checkbox to spin motors. Individually move the motors sliders for motors 1-4 to see if the correct motors and the correct direction. To reverse the direction of a motor, switch any two of the three motor wires. Don’t worry if the motors start spinning at different levels. That will be fixed when we calibrate the motors
ESC Calibration

The EMAX ESC calibration process is slightly different from normal ESCs.
- Unplug your battery
- Hit the “Check” checkbox
- Move the Master slider all the way to the top
- Plug in your battery.
- You’ll hear two short beeps. Within two seconds of the two beeps, move the Master slider all the way to the bottom. You’ll hear one short beep after that, done.
Flightmodes, arm/disarm and buzzer.
Channels 1-4 on your TX will be reserved for Throttle, Aileron, Elevator and Rudder. Channels 5 will be AUX1 and 6 will be AUX2. Set two switches on your TX for AUX1 and AUX2. See video above to see how to do it on the Taranis.

After you set your switches you’ll see the orange bar move when you hit the switches. The orange will be the active state. So just put a check in the mode you want for the position of the switch.
Flightmodes
- Angle – Also know as “attitude” mode. This is a auto leveling flight mode with a angle limiter so rolls and flips are disabled.
- Horizon – An auto leveling mode with angle limiter disabled so rolls and flips are enabled
- Acro/rate – This is a full manual fly mode. This is the default mode when no checkboxes are checked.
So that’s pretty much it for Baseflight. Everything is set up and we can finish building the rest of the quad.
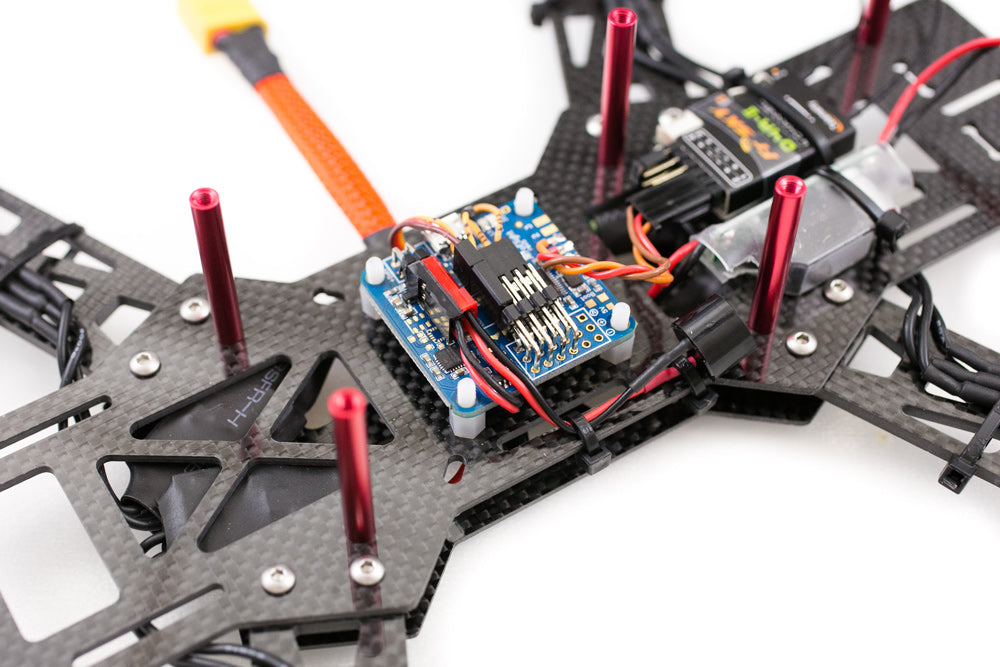
Plug in the discovery buzzer into the Naze32.

Install the power for your FPV. I installed a LC filter to clean up the power from the battery. This connects directly to the battery or PDB. If you aren’t using a LC filter just connect a power wire from your battery or PDB.

To mount the FPV camera we’ll use some zip ties and a coffee stirr. I found this works better than nuts and screws because zip ties never come loose.
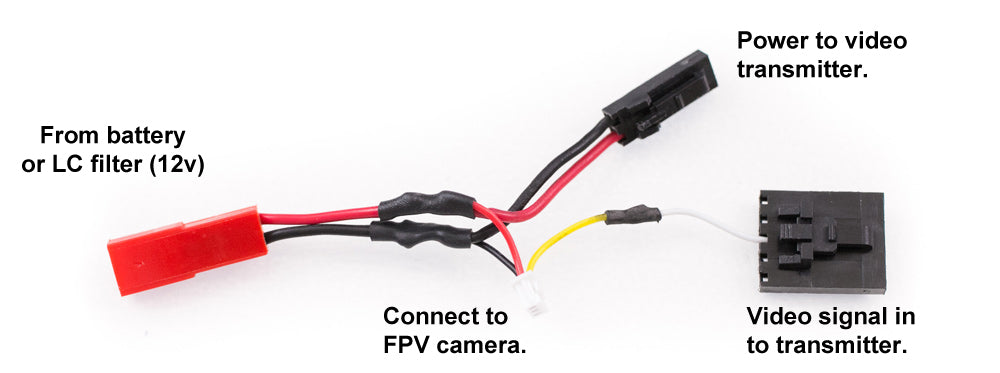
*Note this wire harness is for 12v cameras. If you are using a CMOS camera that requires 5v, you’ll need a step down voltage converter or you can use the 5v power out from the ImmersionRC TX.
This is a wire harness for the FPV. The red connector on the left will connect to the LC filter or your battery. Split the power and ground to the 12v camera and the video TX. Connect the video out from the camera to the video in on the video TX.

Failsafe
This is very important. Failsafe is a receiver feature that tells the quadcopter what to do if it looses the radio signal. For a racing quadcopter you want set the failsafe to reduce throttle to zero if it looses the tx signal. It’s better to have the quad drop to the ground than to fly out of control into someone.
Here’s how you set up failsafe on the FrSky D4R-ii
- Power up the quad and TX.
- On the TX, move the throttle to zero.
- Quickly (less than 1 second) press the F/S button on the rx. Done.
- Test the failsafe. Increase the throttle until motors start spinning and leave it there. Turn off the TX. The motors should stop spinning.
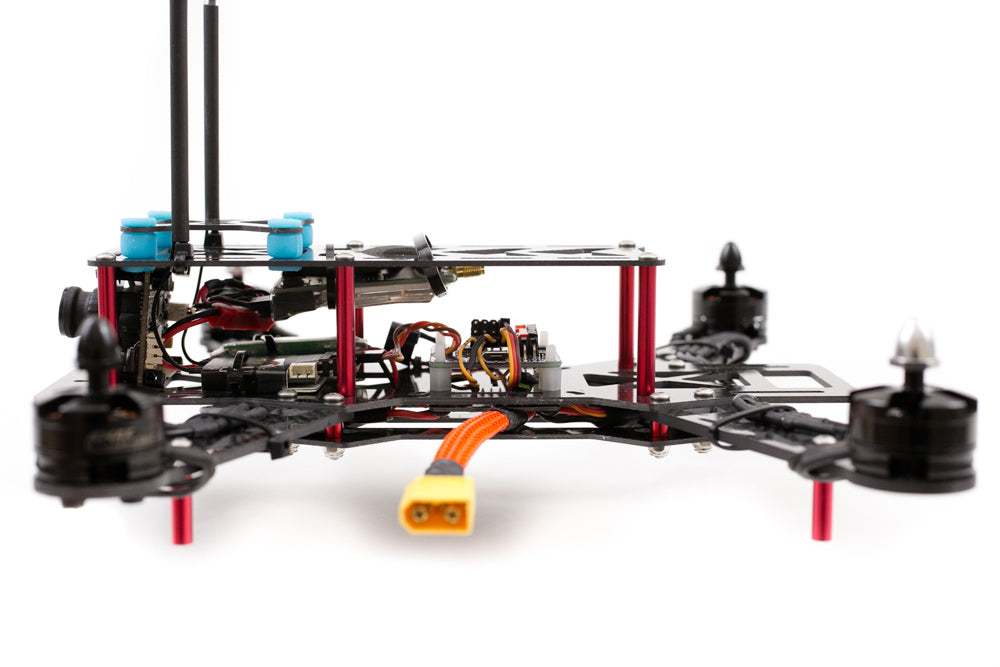
Finished!
That’s it for the build and it’s ready to fly.
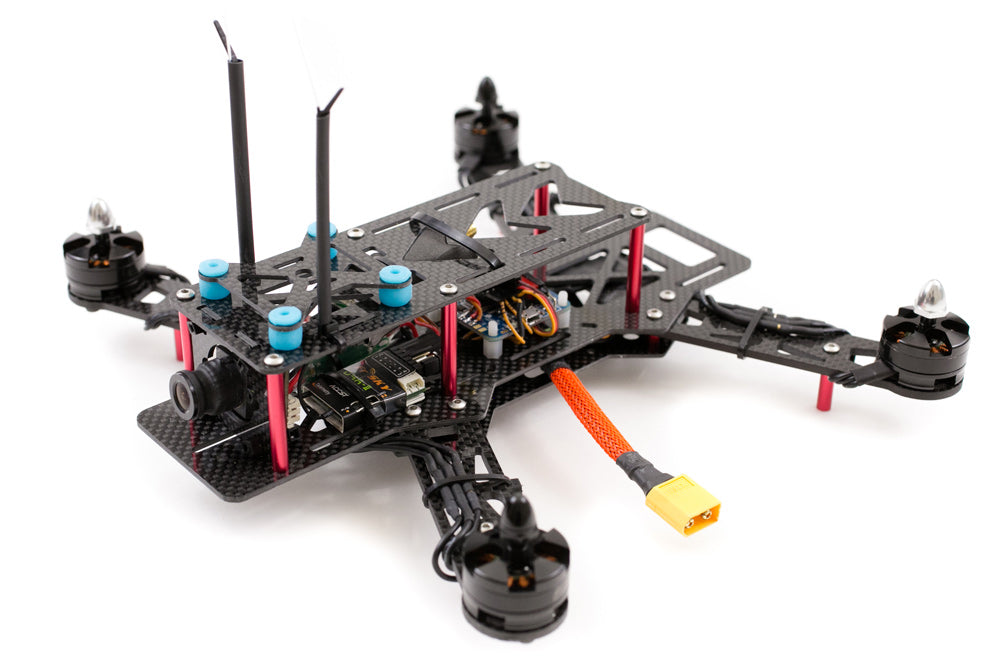

AUW (all up weight) with Mobius and 3s 1300mAh battery is  522g. Not bad for a 285mm quad with 6 inch props.
522g. Not bad for a 285mm quad with 6 inch props.
My first impression of the EMAX Nighthawk 250 is how smooth and powerful it is. I’m surprised it’s so fast and quiet. Compared to my ZUUL which sounds like a swarm of angry wasps, the Nighthawk is nearly silent. It’s my first time flying with carbon fiber props so maybe that’s why. After a quick tuning session it felt pretty locked in and responsive. On 3s batteries, the EMAX Nighthawk Pro is faster than my ZUUL on 5″ props.
The quality of the parts are actually pretty good not just for a $35 frame but for any frame. The 3mm carbon fiber arms feel super stiff and strong. It came with a bunch of extra hardware which is pretty sweet. My only gripe about the build is that the 30.5mm x 30.5mm holes for the flight controller are a tiny bit smaller than 30.5mm. No big deal, a little muscle made everything fit.
Does that mean I’m making this my main quad? Nope. I vowed to not fly fixed arm quads anymore ever since owning a Lumineir QAV250. That doesn’t mean fix arm quads are bad. It just means I’m not a good enough pilot yet. Foldable arm quads such as the ZUUL and Vortex are much more forgiving in crashes. But the good thing about the EMAX Nighthawk is that it has replaceable arms unlike the QAV250. EMAX Replacement arms are $8 vs $45 – $55 hit to your wallet when you break a QAV250 arm. For the price replacing a QAV250 arm you can buy an entire EMAX frame!
So if you are in the market for your first quad or a seasoned pilot looking for a 6″ prop frame, I can highly recommend the EMAX Nighthawk 250 (280mm) Pro kit. For around $185, it’s a killer deal!
If you found this post helpful and want to support the site, you can make your Amazon purchases through the links on this site or with this Amazon link. It won’t cost you anything extra. Thanks in advance, I really appreciate it 🙂