
How to Setup a Lumenier QAV210: Part 2
How to Setup a Lumenier QAV210
In part 1 of the Lumenier QAV210 build series we did most of the physical build of the quad. Part 2 will be about the programming. I’ll show you how to set up the Taranis with RSSI from the OSDoge and program all the switches. Instead of regular CleanFlight we’ll be flashing the Naze32 with BetaFlight. Then we’ll set up the OSDoge.
Taranis Setup
First thing we need to do is create a new model on the Taranis, assign all the switches and setup RSSI. Watch the video above on how to do that.
We’ll set up our switches this way:
Channels 1-4 can’t be assigned to switches. These are reserved for controlling the quad: throttle, aileron, elevator, rudder.
Channel 5 – (AUX1): Flight Modes (angle, horizon and acro)
Channel 6 – (AUX2): Arm/Disarm, Buzzer
Channel 7 – (AUX3): Airmode (optional)
Channel 8 – (AUX4): RSSI
Note: I’m using OpenTX firmware 2.0.7 on my Taranis. If you are on firmware 2.1.x, to get the RSSI to show up in source (page 5/12 in the Taranis), you’ll need to first bind your d4r-ii then go to page 12/12 and scroll to “Discover New Sensors”. This will allow RSSI to show up in the source. (Thanks to one of my readers Richard Lu for this tip!)
To find out what firmware your Taranis is running, turn on the Taranis. On the first screen push and hold the MENU button. This will bring you into the Taranis settings menu. Scroll down to page 4/8 and it will tell you the version right there.
Watch the video on how to bind the d4r-ii to your Taranis.
BetaFlight
This is by no means an in depth setup for BetaFlight (CleanFlight). It’s a good general setup meant to get you started flying. Once you learn the basics here you can tweak the settings to your liking.
What is BetaFlight? It’s basically a tuned version of CleanFlight by BorisB. I’m too stupid to understand all the tech stuff but I’m smart enough to know that it flies waaaaay better than regular CleanFlight. Even with the default PIDs it feels like a tuned quad on regular CleanFlight. Zero oscillations or wobble on the default settings. Really you could leave the PIDs alone and just turn up the rates to your liking.
Flash BetaFlight
- In Chrome, install CleanFlight configurator.
- Download and install the correct CP210x USB to UART Bridge VCP driver for your computer system.
- Download the HEX code for BetaFlight. Go here, scroll down to Downloads and find the HEX code for NAZE.hex, click and download.
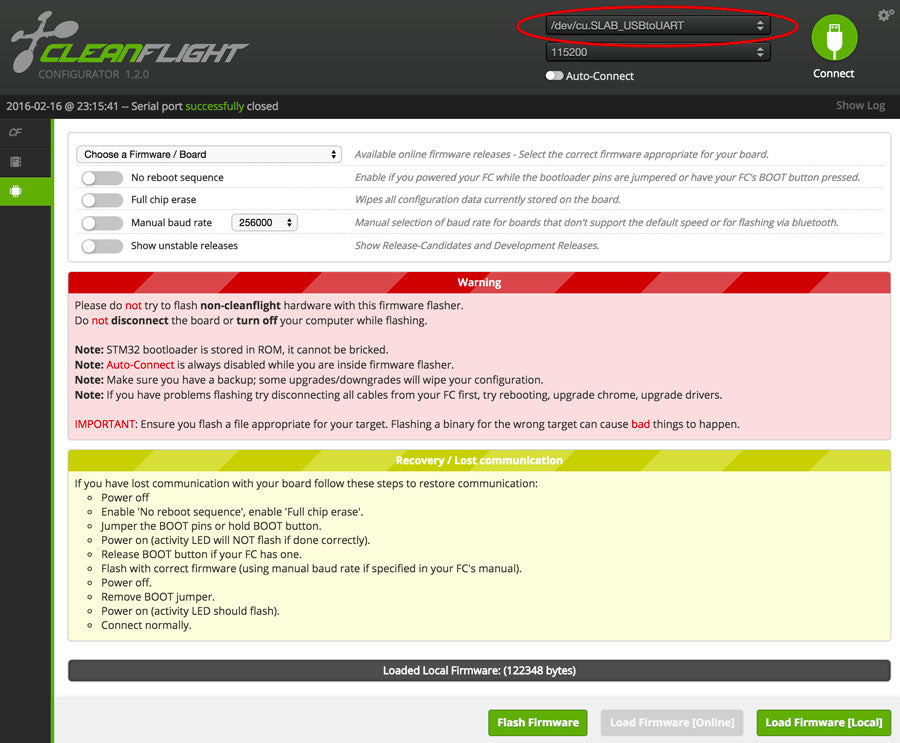
- Open CleanFlight and connect the USB to the Naze32.
- Go to “Firmware Flasher” on the left.
- Click “Load Firemware [Local}” on the bottom right.
- Select the NAZE.hex file you downloaded in step 3.
- Click “Flash Firmware”
- Done. Click connect. Your Naze32 is now running BetaFlight
Common reasons why your Naze32 won’t connect to CleanFlight
- The VCP driver wasn’t installed or the wrong version was installed.
- The wrong COM port was selected
- Something wrong with the USB cable. A lot of my readers have run into this issue. I use this AmazonBasics USB to Micro-USB cable and it works fine.
- Sometimes I have to open Cleanflight first then plug in the Naze32 before the SiLabs com port will show up.
- The USB is connected to the OSDoge instead of the Naze32. Yes this is a common mistake.
Configuration
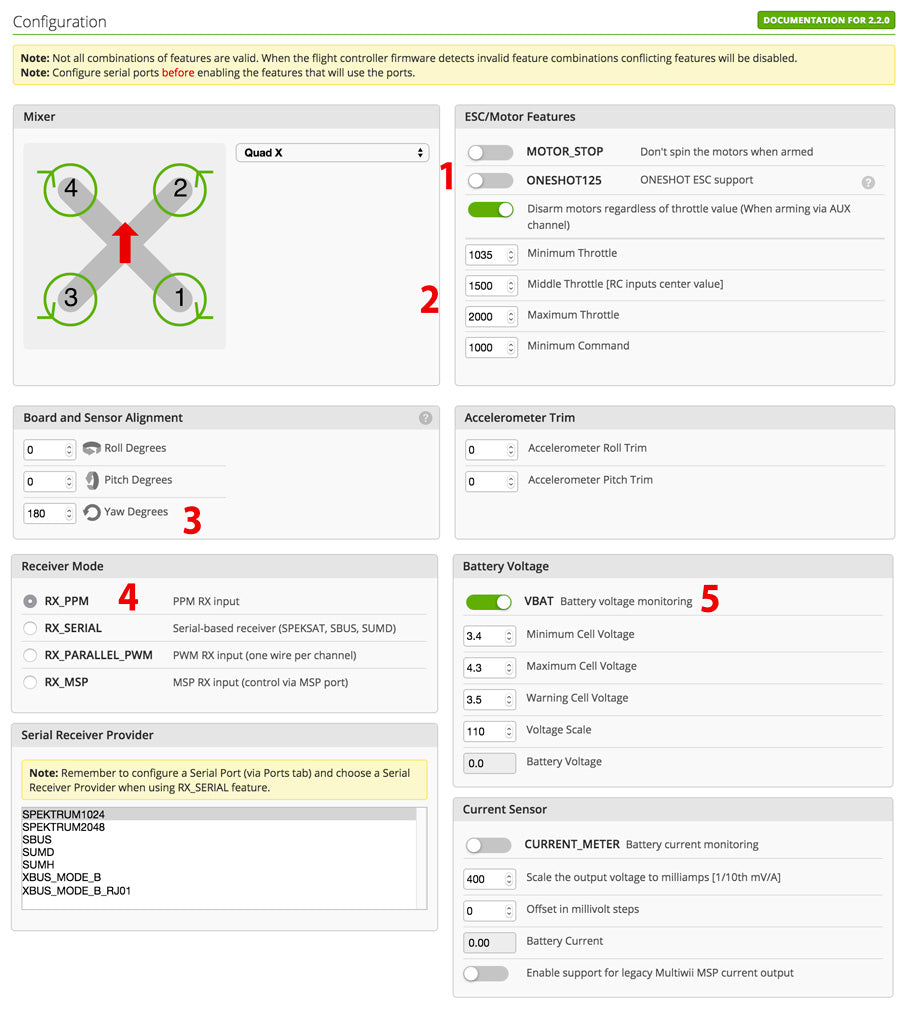
- Motor Stop – for first time fliers I would start with enabling this (green). This makes the motors not spin when the quad is armed and throttle is at zero. Mine is disabled because I fly with Airmode. Airmode is a feature in Betaflight that lets you still have control over your quad when the throttle is at zero. This lets you do some fun aerobatics with more upside down hang time and still be able to control your quad. With motor stop enabled, if you put your throttle to zero your motors will cut off and there’s a slight delay before they will spin back up. Kinda scary if you are upside down. Play with it and see what you prefer.
- I start with max throttle at 2000 and min at 1035. See video on how to tune this for your quad.
- Since the Naze32 is facing the rear (arrow pointing rear), you have to set the YAW adjustment to 180. Otherwise your quad will flip like crazy when you try to take off.
- We are running the D4R-ii in PPM mode so enable this here.
- Enable VBAT monitoring. This is the low voltage threshold per battery cell. So for a 3s battery to have the buzzer go off at 10.2v set it for 3.4v (3.4 x 3 = 10.2). For 4s it would go off at 13.6v (3.4 x 4 = 13.6). You can set this to your preference.
Receiver
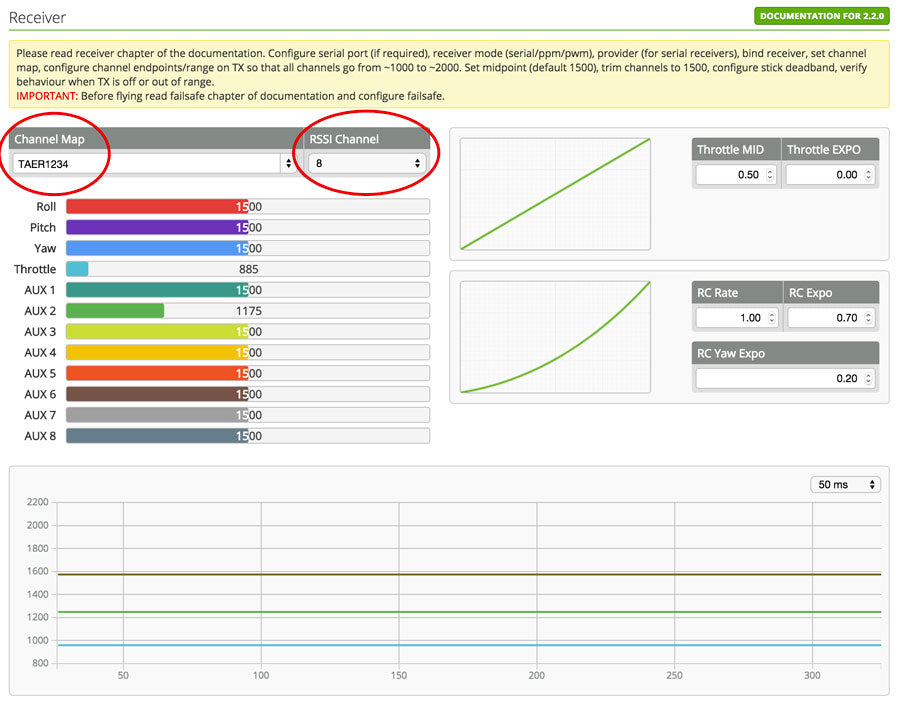
Change Channel Map to TAER1234 and select the channel you assigned RSSI on your Taranis. I used channel 8.
Motors
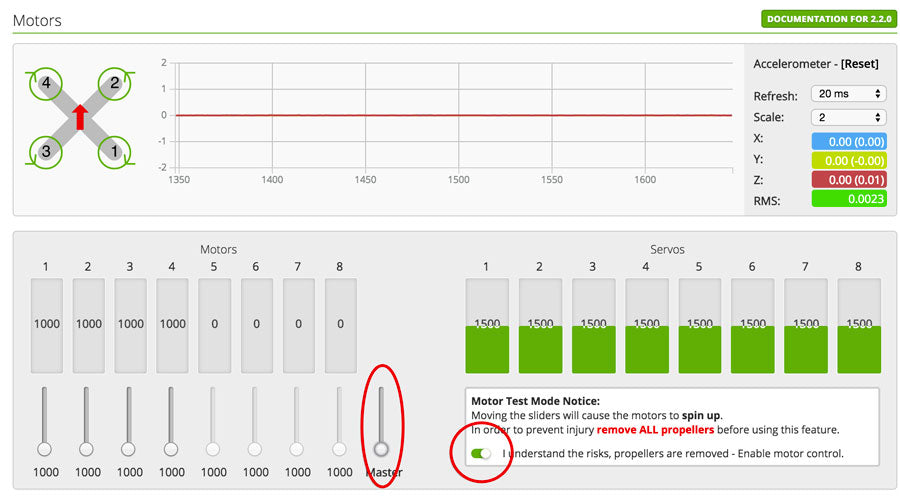
**DO THIS WITH THE PROPS OFF**
This is where you calibrate your ESC and make sure the motors are spinning the correct direction. Don’t be lazy and leave the props on. Take them off! You can seriously hurt yourself.
Calibrate the ESCs
- Have the Naze32 connected to CleanFlight but battery disconnected.
- Enable motor test mode
- Move the master slider to the very top
- Plug in the battery and you’ll hear a bunch of music
- Before the music tones stop, move the master slider all the way down.
- After all the beeping tones stop, unplug the battery
When you plug in the battery and move the master slider, all the motors should spin up at the same time
Next test each motor using the individual motor sliders 1-4 to make sure the correct motor spins and in the correct direction according to the diagram on the top left. If the wrong motor spins up, check the signal lead from the ESC to the Naze32. If the motor spins the wrong direction, unsolder any two of the three motor wires and flip it. This will reverse the direction of the motor.
Modes
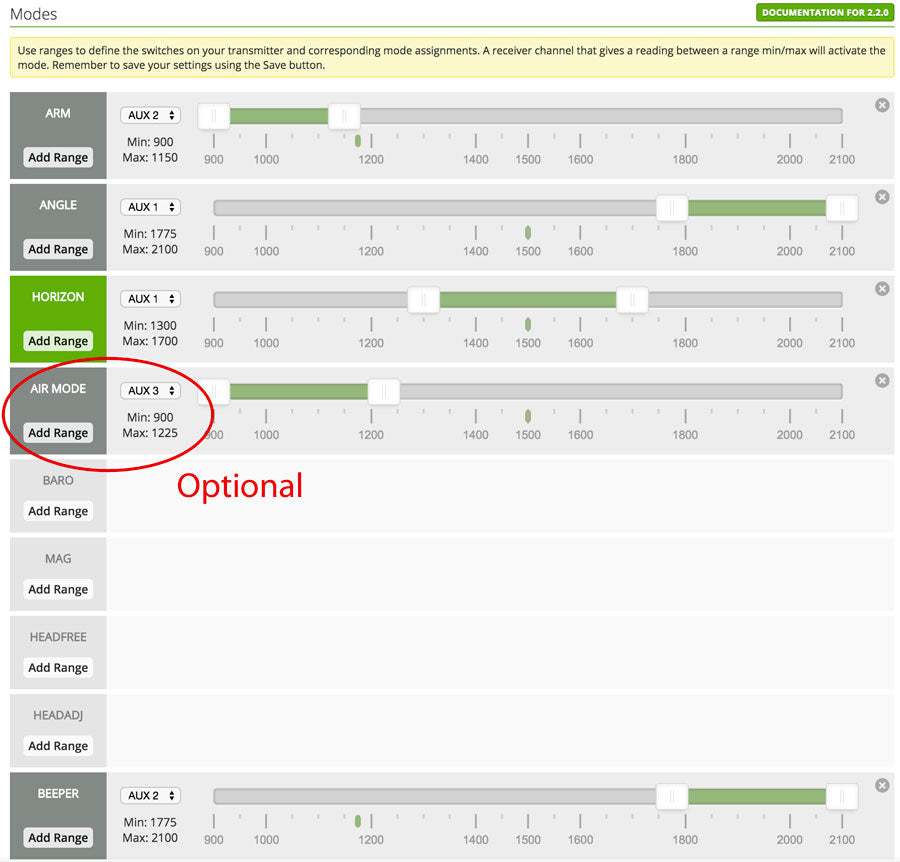
To set modes to a switch, click “Add Range” on a mode, select the AUX switch you want to assign it to. Set the slider to the position (up, middle or down) you want to use to activate that mode. I have AUX1 assigned to flight modes. If you don’t set a range for the switch position, that will be for acro. AUX2 is ARM/DISARM and buzzer. AUX3 is setup for Airmode.
FLIGHT MODES
- ANGLE: This is a self leveling mode with limits on flight angle. If you let go of your sticks the quad will level out and you CAN’T do flips or rolls in this mode.
- HORIZON: Self leveling but without limits on flight angle. If you let go of your sticks the quad will self level and you CAN do flips and rolls.
- RATE/ACRO: This is a full manual flight mode. Non-self leveling and your quad will stay in whatever angle you leave it.
PIDs
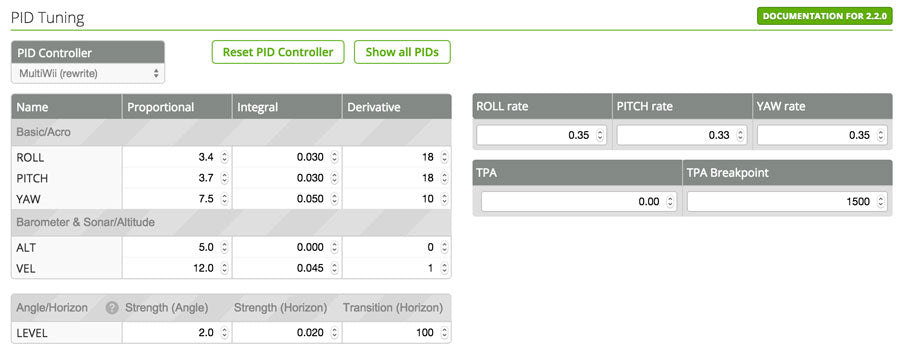
This is the beauty of BetaFlight, PIDs! I don’t know what kind of magic BorisB did but even at default PIDs the quad flies great. It’s smooth and easy to control.
These are the starting settings I use. I just drop the P values a little bit to smooth out the throttle punches. Generally the more powerful the quad (4s), the lower the P values should be because everything is multiplied. The default settings have the ROLL, PITCH and YAW rates set at 0. This is too low. Start with .20 or .30 and play with the rates until you get a number you like. The higher the number the more responsive it will be but too high and it will get pretty twitchy.
OSDoge
I won’t get too in depth with the OSDoge setup because I’ve already done two posts on this, Setup the OSDoge and OSDoge with MWOSD 1.5 update. I’ll focus more on problems connecting to the board.
- Download MWOSD 1.5.x The newest is 1.5.1 but it doesn’t support mac yet so I’m using 1.5.
- Update your Java. I’m using Java 8 update 66
- After you update Java go to this page to verify your Java version. It will ask if you trust this source, click yes, then run. What this does is it gives Java permission to be used on your computer.
- Download the CP210x USB to UART VCP driver for your system if you haven’t already done this for your Naze32. I’m using the Mac OSX v4
- After you download and install everything, restart your computer.
- On the OSDoge board, move the switch towards the USB and connect the USB to your computer. Make sure you plug the USB into your computer with the board connected before moving to the next step. On mine if I don’t do this it won’t open my correct CP210 port.
- Open the MWOSD folder and find the folder MW_OSD_GUI
- Open the folder for your system. I’m using a mac so I’m using the “applications.macosx”. If you are on a windows machine, open the one for your version of windows, 32 or 64 bit.
- Click the “MW_OSD_GUI” icon to open the program.
- Once you open the GUI, near the top left you’ll see all your COM ports. Click the “SLAB_U-BTOUART” port to connect. (See the MWOSD image below circled in red)
 On step 9, if you get an error saying the the file is damaged and it should be deleted, it’s just a firewall error. On a mac go to system preferences > security & privacy > general tab > and under “Allow apps downloaded from:” click “Anywhere”. You’ll only have to do this the first time you open the GUI. After it opens you can set it back to whatever you want.
On step 9, if you get an error saying the the file is damaged and it should be deleted, it’s just a firewall error. On a mac go to system preferences > security & privacy > general tab > and under “Allow apps downloaded from:” click “Anywhere”. You’ll only have to do this the first time you open the GUI. After it opens you can set it back to whatever you want.
Here are common reasons why the OSDoge
- VCP driver was not installed or wrong one was installed.
- Wrong version of JAVA was installed.
- JAVA permission wasn’t granted.
- Bad USB cable.
- OSDoge board was not connected before the MWOSD GUI was opened

When you connect, here are the settings you’ll need for RSSI and Voltage monitoring. In the “Other” box, set the units you want to use and either NTSC or PAL for our European friends. The other stuff is a matter of preference.
Main Voltage – enable display voltage and set the battery cells and voltage alarm. Voltage alarm is when the voltage will start flashing. You can leave voltage adjust alone for now. We’ll calibrate that later.
RSSI – Enable “Display RSSI” and “Use FC RSSI”, set min to 0 and max to 255. Set the alarm to whatever percentage you want. RSSI will flash if it goes below this number.
There’s still hope!

So you’ve checked all these steps and you still can’t get the OSDoge to connect…don’t worry. You don’t need to. You can set everything via the OSD and the Taranis.
With the Naze32 disarmed, on the Taranis move the sticks YAW right PITCH up. This will bring you into the OSD menu. Use right stick (roll, pitch) to move the cursor and YAW left/right to make changes. When you are done, scroll down to “SAVE+EXIT”
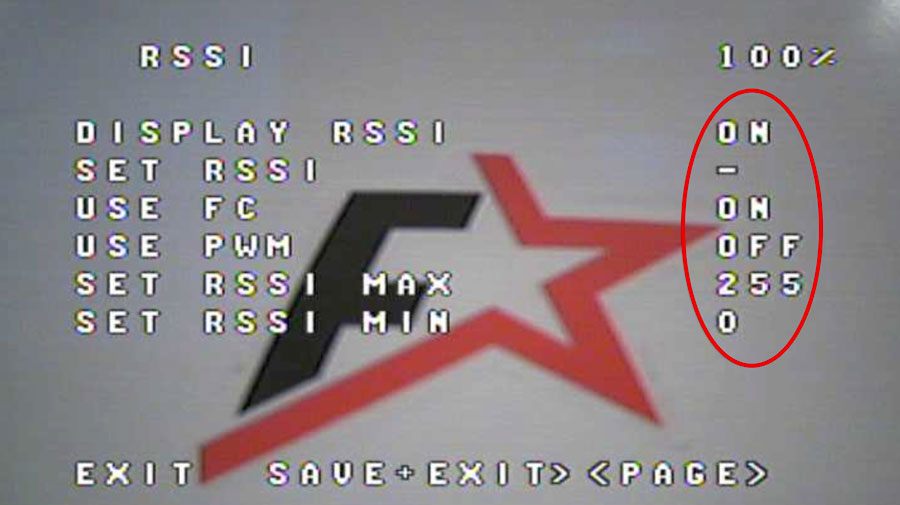
Here are the settings you need to change to enable RSSI and voltage monitoring. The rest of the options depends on whatever you want to see in your display.
While you are here you can calibrate the battery voltage. Use a LiPo battery checker and get the voltage of your battery. Adjust the number circled below until the display voltage matches your battery voltage.
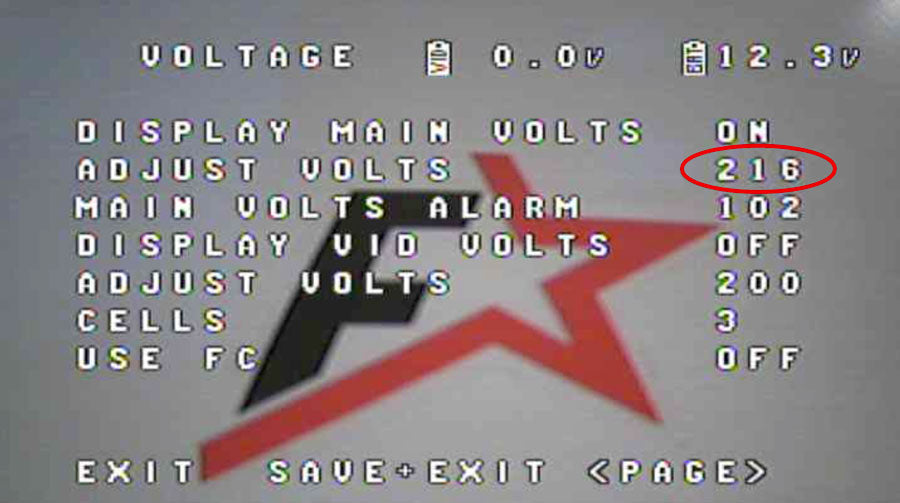
Make sure you turn on “DISPLAY MAIN VOLTAGE” and turn off “USE FC”. The rest of the settings are adjustable. Change the CELLS to 3 or 4 per your battery, and MAIN VOLTS ALARM is the threshold you want the battery display to start flashing. I just make this match the setting I used in the Naze32.
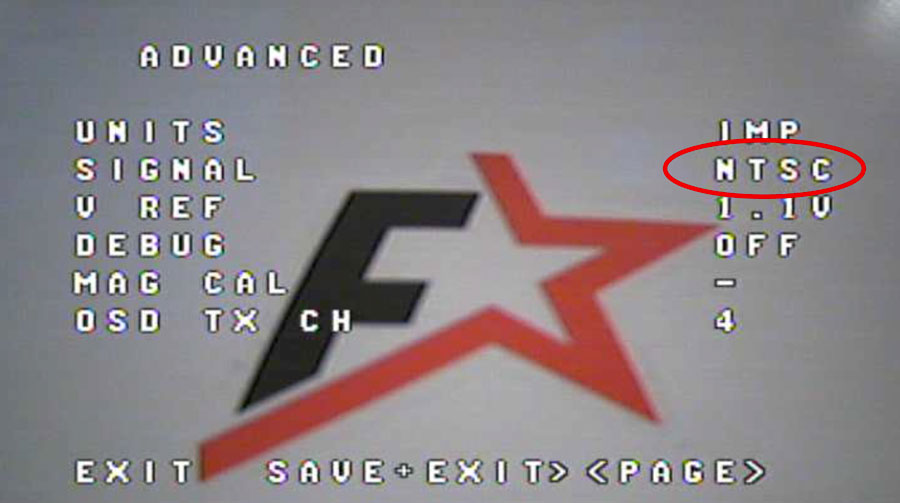
Make sure you set the correct signal for your system. If the FPV camera you are using is NTSC, make sure you set it to NTSC. If you don’t you won’t get the video in your goggles.
Finished!
Once you’ve verified your motor are spinning the correct direction and on the correct signal wire to the Naze32 you can shrink the heat shrinks on the ESC and arms.
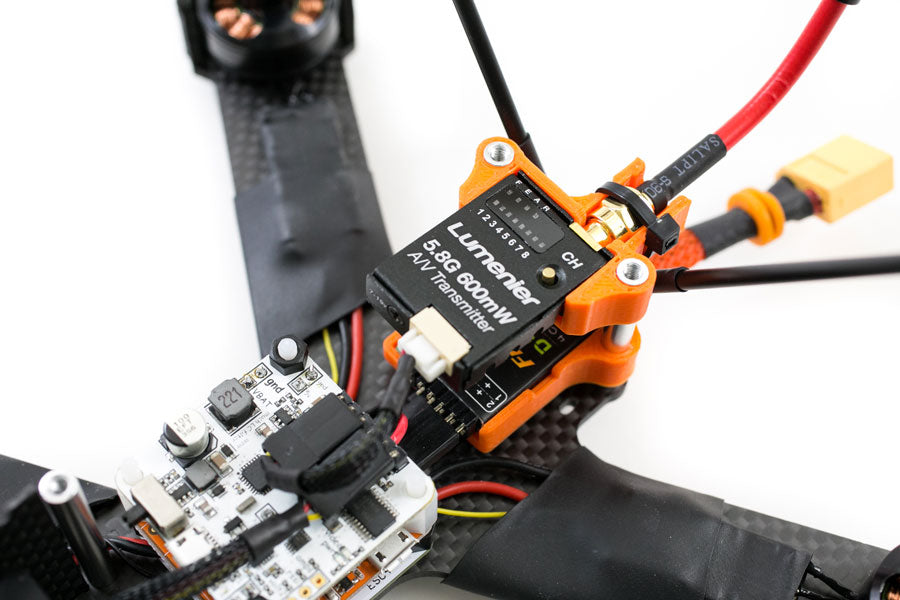
Last step is to connect the FPV camera and VTX. When you plug in the cables make sure you plug them in according to the label on the OSDoge board. Grounds are on the inside.
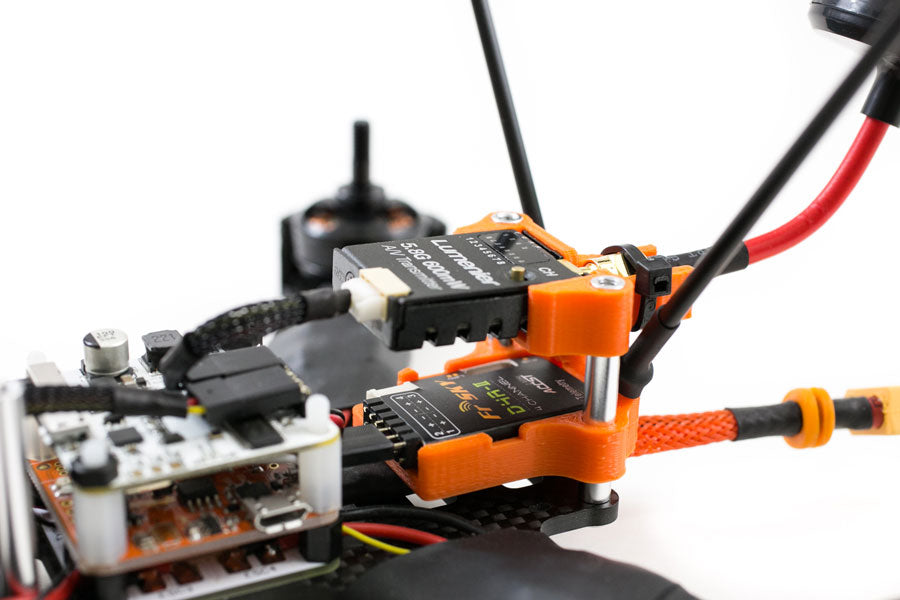
I’ll be using the QAV210 VTX brace I designed. It braces the SMA connector on the VTX and prevents it from getting ripped off the circuit board. It makes it easy mount by sliding onto the rear standoffs like the d4r-ii mount. Just put a zip tie around the antenna.
FailSafe
This is very important. Failsafe is a receiver feature that tells the quadcopter what to do if it loses the radio signal. For a racing quadcopter you want set the failsafe to reduce throttle to zero if it looses the tx signal.
I know what you are thinking, why don’t you reduce the throttle to 20% so it will glide safely to the ground? Here’s why: if your failsafe kicked in, it means you lost control of the quad. You don’t want the props spinning at all if it “glides” into a group of people. Keep in mind how sharp the props are. It’s like a spinning knife weapon.
It would be great if it would just glide to the ground but it hardly ever lands that way. Try this next time you are flying. Fly in acro/rate mode, cut the throttle to 20%, let go of your controls and see what the quad does. I promise you it will not glide safely to the ground. It will crash in an awkward way with your throttle still at 20%. You will not only break something but you’ll probably burn up your ESCs and/or motors.
It’s better to have your quad fall to the ground rather than fly into someone with spinning props.
Here’s how you set up failsafe on the FrSky D4R-ii
- Power up the quad and TX.
- On the TX, move the throttle to zero.
- Quickly (less than 1 second) press the F/S button on the D4R-ii. Done.
- Test the failsafe. Increase the throttle until motors start spinning and leave it there. Turn off the TX. The motors should stop spinning.
Conclusion

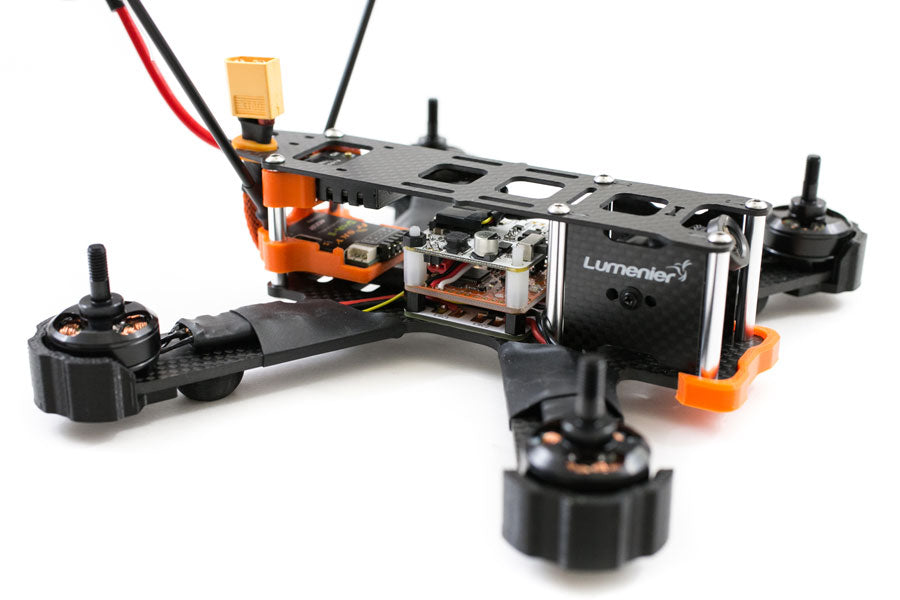
The Lumenier QAV210 is one of the easiest frames to build. Having the PDB and ESCs on the same side of the main frame makes soldering a piece of cake. I must admit, the first QAV210 I built I had some trouble figuring out where to put the VTX and d4r-ii because the frame is so small. There’s far less room on the QAV210 vs the QAV250. That’s why I designed the 3D parts. It makes mounting the VTX and d4r-ii so simple and most importantly so clean 🙂
The built QAV210 above weighs 320g vs 360g on a similarly built QAV250.
It’s pretty freaking tough too. I’ve flown mine full speed into a tree and all it did was rip the velcro strap and send the battery flying 15 feet away.
I highly recommend this frame for beginners to advanced!
If you found this post helpful, it would be super cool if you purchased the components from my store or purchase items from my Amazon links. These posts are expensive and take a loooong time to make especially this one! Some of the segments in the video I had to reshoot 3-4 times because CleanFlight was messing up my screen recording and making the separate audio tracks not sync up. The purchases make it possible for me to keep making them. Thanks in advance, I greatly appreciate it 🙂