

How to Build the Best Quadcopter for Racing
Let’s build the best quadcopter for racing. When I first started this site, I made a post on How to Build an FPV Quadcopter in April 2015. It was an intro on how to build a quadcopter using good parts, at that time. The quadcopter industry is advancing so fast. Just 18 months have past and parts used in that build were considered good at the time seem obsolete now.
It’s time for an update on my first quadcopter build. In this post I’ll be building the best quadcopter for racing at this time. I think I may have to do one of these posts every year just to stay up to date!
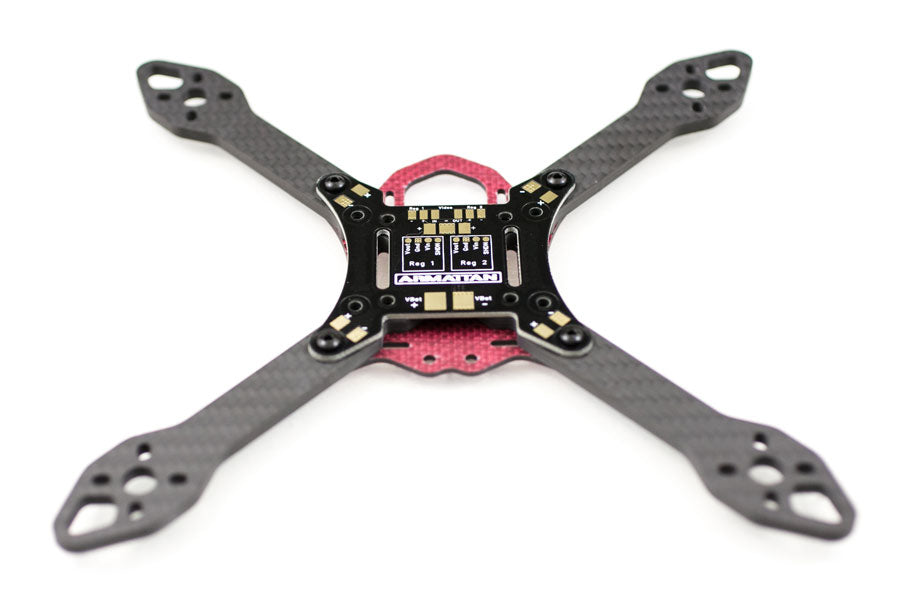
I’ll be using a 200mm X pattern frame, the Armattan SCX 200 frame. Now keep in mind this build method can be applied to nearly every quadcopter frame. It can even be applied to my QAV250, QAV210, QAV-R and QAV-X builds. The build method is essentially the same but just without the OSD. Since this will be a quadcopter for racing we won’t be using on screen display. All the voltage, RSSI and time info will come from the Taranis telemetry.
Parts used in this build:
- Armattan SCX 200 with LED – a great well thought out and strong 200mm X pattern frame
- KISS Flight Controller – easy to set up and tune
- KISS 24a ESCs
-
EMAX RS2205-S 2300kv Motors –
The updated version of my all time favorite motorsSee update note below on motors. I’m using the new T-Motor F40II 2400kv now. - FrSky XSR – small full featured rx with telemetry
- HS1177 Camera
- FX FX799T 200mw VTX – inexpensive 200mw 40channel transmitter
- TBS Triumph Antenna
- RaceKraft 5040 Tri-Blade – my favorite props right now. Good thrust with ultra fast throttle response.
- Tattu 1550mah 4s R-line batteries – monster batteries that have the horsepower to sustain full throttle for long periods of time without much voltage sag.
Not Needed but I love these
- 2.5mm 110 degree FOV lens – I love this lens. It makes seeing cones and gates so much easier. The default HS1177 comes with a 2.8mm 87 degree FOV, which in my opinion is way too narrow. I get lost on tracks because I can’t see the next gate.
- 12v Pololu – save your FPV gear by powering them off a regulated 12v source.
- 35 Degree GoPro mount
Tools used
- Weller WESD51 soldering station – if you’ve never soldered before, have not fear! It’s easy and fun. Check out this soldering basics post.
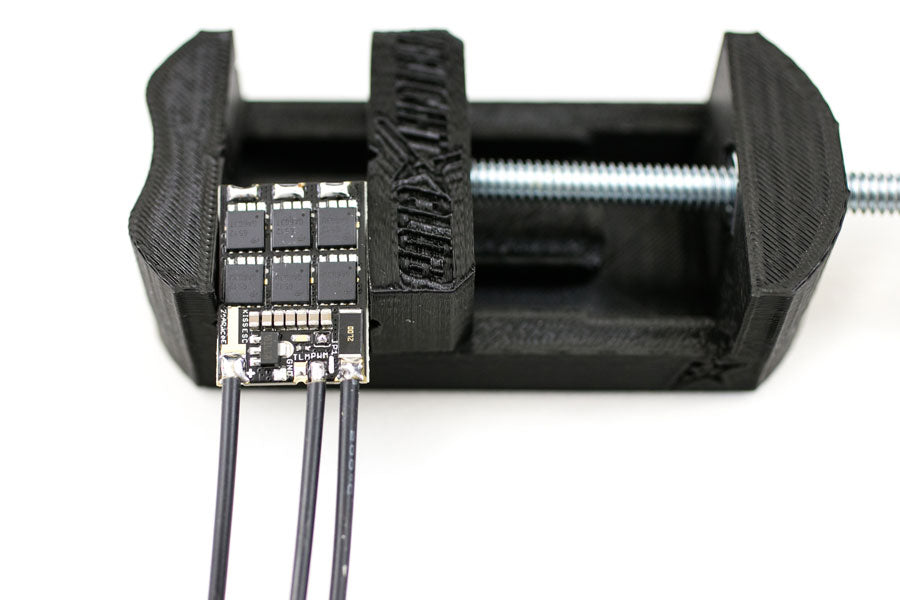
- Soldering Vise – gives you a hand when you are one hand short.
- Wiha Metric Hex and Philips screwdrivers – can’t emphasize the importance of having the right tools for the job. No more stripped heads.
Build Kit
I’ve put together a build kit that that include all the parts used in this post. It comes with all the miscellaneous parts (12v Pololu, buzzer, cables, silicon wires, heat shrink…etc) that you’ll need to complete the build. It also includes the Taranis program file that has all the switches, telemetry, voice prompts and timers. The cheat sheet and KISS backup file is included also.
Testing

Once again I’ve built two identical quads with different motors, T-Motor F40 2300kv and EMAX RS2205-S 2300KV motors. I heard a lot of good things about the T-Motor F40 2300kv motors so I decided to give them a try. After flying both motors I’m going with the EMAX motors. Both motors feel really good with lots of power but on the T-Motor I found myself at 100% throttle more often than the EMAX. On the straight aways the T-Motors seem to lack the top end speed I wanted whereas the EMAX I felt like I had some power in reserve if I wanted. The new EMAX RS2205-S are stupid fast. Another plus is the EMAX motors are $20 less a set than the T-Motor.
*1/16/17 UPDATE
I’ve been using the new T-Motor F40 version II 2400kv and now this is what I run. The new version F40II are monsters. They are smoother and have noticeably more power than even the EMAX motors. Dont bother with the original F40, the F40II are now my new favorite motors.
Build Schematic
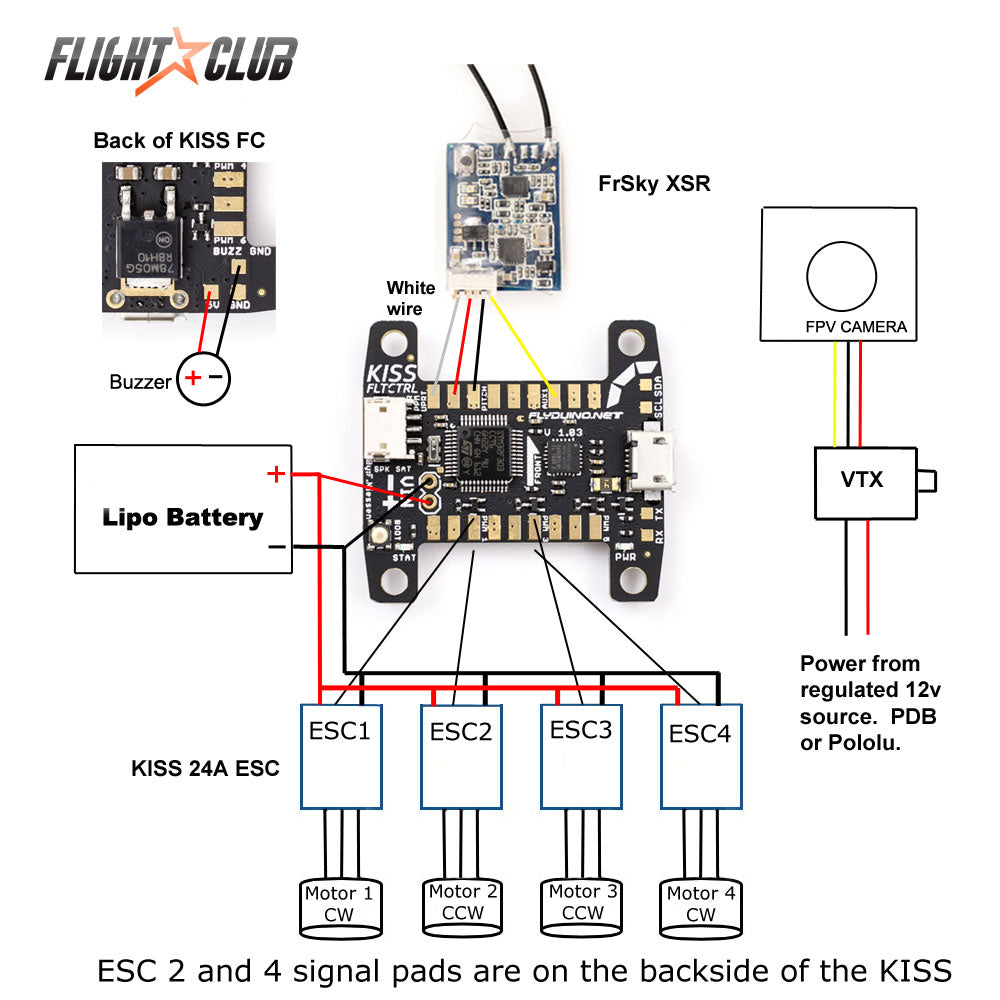
Let’s Start the Build!
I can’t tell you how many ESCs I’ve had killed by the props striking them. If you experience a weird twitch after a crash and your motors and props are fine, there’s a chance a tiny component was knocked off your ESC by the props.
It’s a little more time consuming but I’ll be mounting the KISS 24A ESCs on the bottom of the arms.
Install the arms on the frame.

Start by pre-tinning the motor, power and signal pads on the ESC. Then solder on the power and signal wires on the ESC. If you are using the EMAX RS2205-S 2300KV motors, you can go ahead and bridge the motor reverse pads on the KISS 24a ESC for motors 1 and 3.
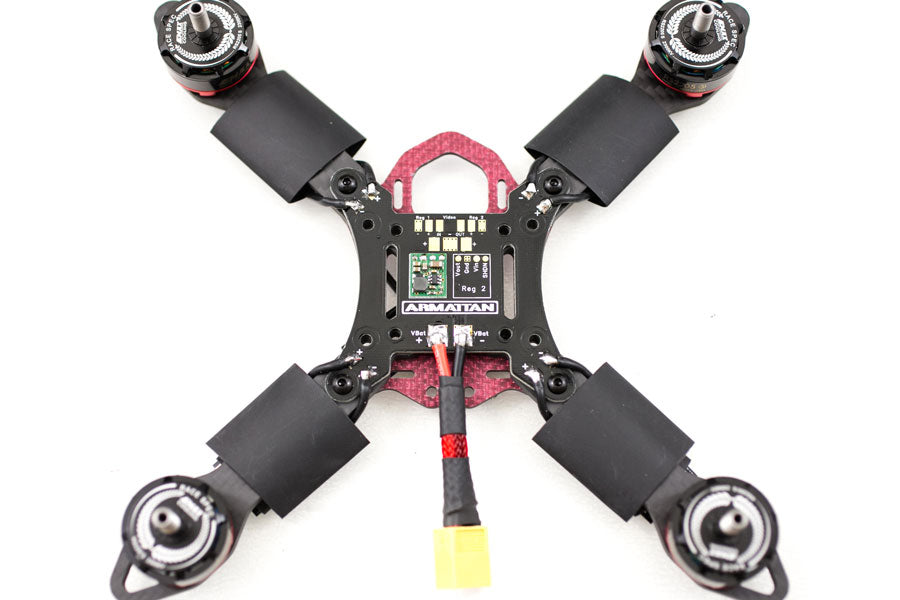
Slip on the big arm heat shrinks and mount the motors with the wires pointing away from the quad. Thread the motor wires through the holes going under the arms and solder on the ESCs. No need to cross any wires. Solder the motors to the ESC straight on. Slip on the ESC heat shrink. Pull the power wires on the ESC until there’s no slack and solder on the PDB.

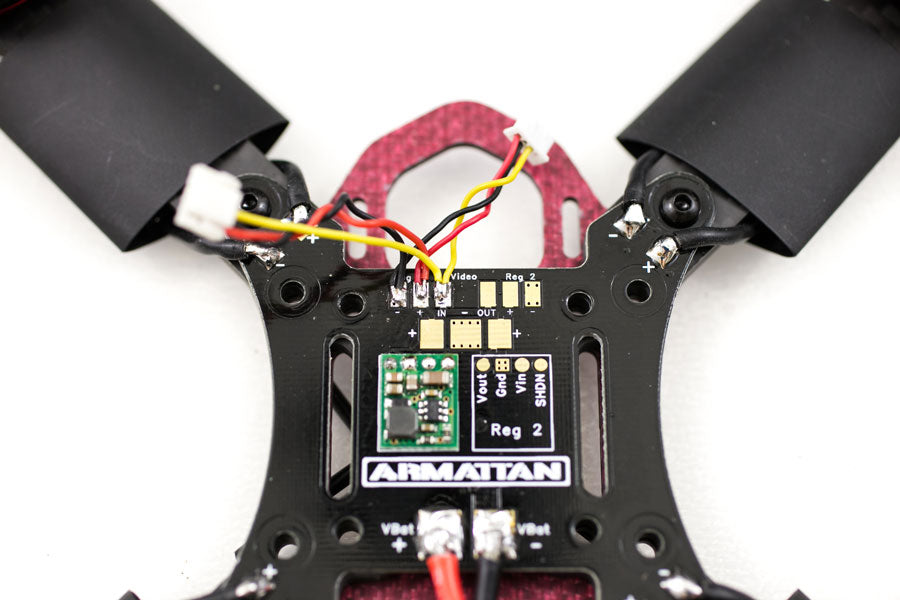
Solder on the 12v Pololu for the FPV gear. This will give you a clean regulated power source. You could directly solder the FPV gear on the PDB and it will work but that’s not good practice. It will work at first but the voltage spikes from the ESCs will eventually kill your VTX and/or camera. Do it right the first time!
The easiest way I found to surface mount a Pololu without holes is to lightly tin the 4 pads on the board. The put solder on one hole on the Pololu. The align the holes to the pad and tack the first hole. If you do it right the solder will melt through the hole and bond with the pre-tinned pad below. Next just add solder to the rest of the holes. (watch the video) Solder on the battery cable and check the output of the Pololu with a digital multimeter to make sure it’s outputting 12v.

Cut and install the VTX and camera cables on the regulated 12v pad of the Pololu. Directly soldering the wires on the pad eliminates the need to splice, solder and cover the tiny wires with heat shrink.
Next is to install the KISS fc.
It’s always a good idea to flash the flight controller before you start soldering. But for the sake of this post I’ll show installing the KISS flight controller then do the flashing. But really I’m going to flash first just incase there’s an issue with the board I won’t have to redo the whole install.
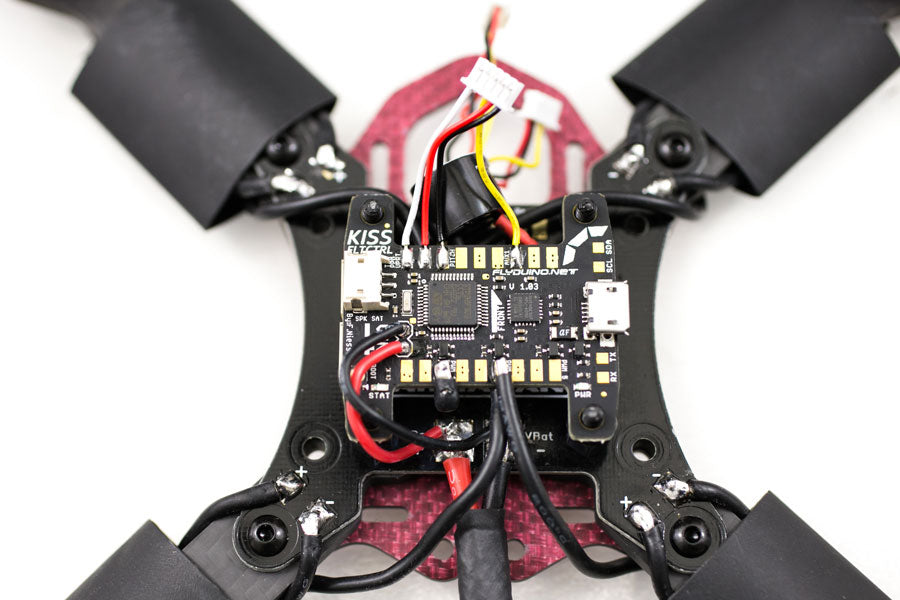
Pre-tin all the pads on the KISS fc for signal, rx and buzzer. Add the VBAT wire so you can solder it on the PDB later. Add the buzzer.
Solder all the signal wires from the ESCs to the KISS. Make sure you install the correct motor/esc signal to the correct pad on the KISS fc.
Cut the wires and install the XSR rx to the KISS fc. The yellow wire is the Telemetry wire.
Taranis Setup
At this point we are pretty much done with the build part of the race quadcopter. To setup the rest of the quad you’ll need to program the Taranis first. For the sake of keeping this post short, refer to the QAV-X part 2 for setting up the Taranis. The setup on this quad is exactly the same. See the video HERE.
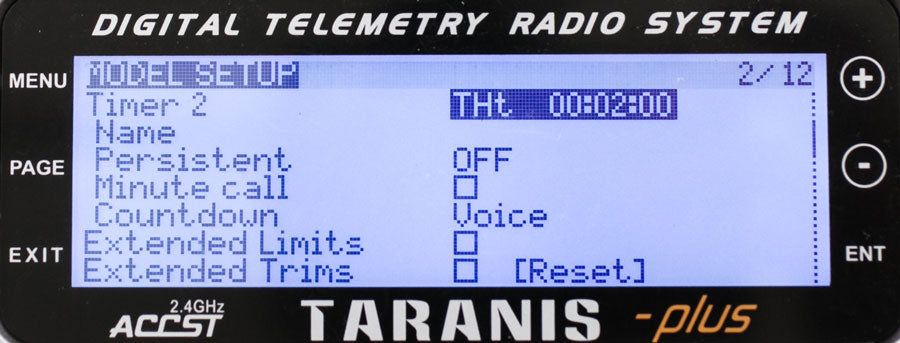
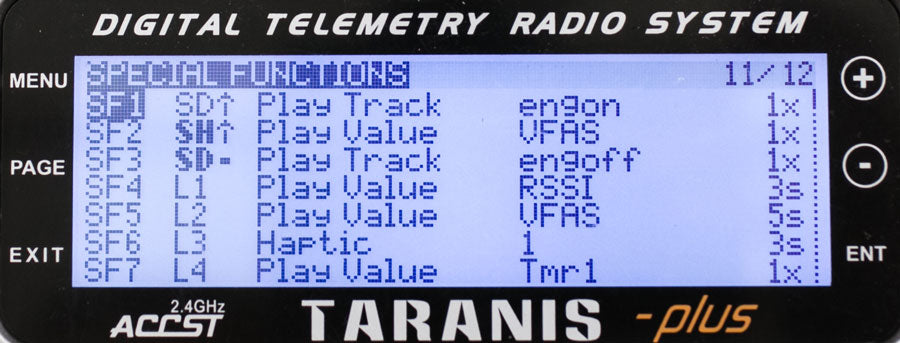
The only thing different I’m doing from the video is setting up a 2 minute race timer. This timer will give you a haptic and verbal notification at 30 and 20 seconds left in the race. Then countdown from 10 seconds to zero.
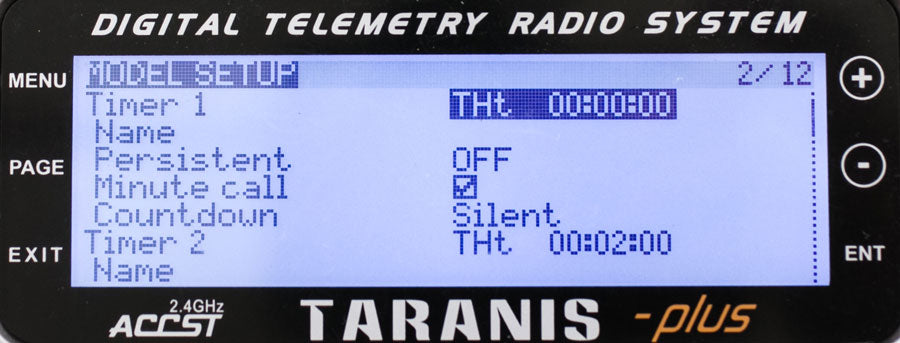
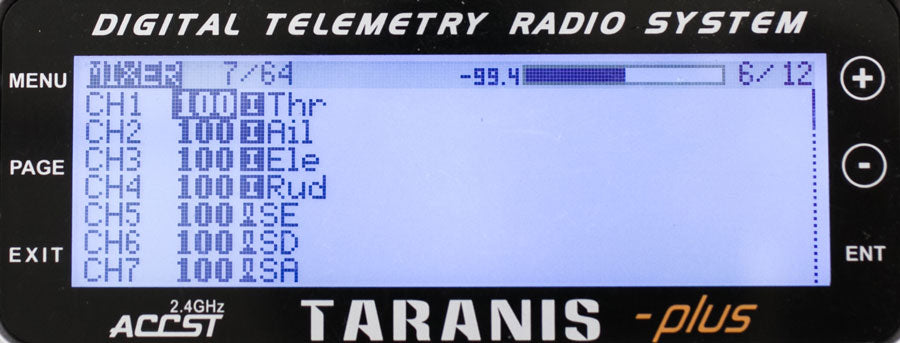
Timer 1 is just an overall flight timer with the minute call set. This will say the time every minute. Using THt will only start the timer when you give it throttle.
Timer 2 is the 2 minute race timer. Set countdown to Voice. This will be the verbal prompts.
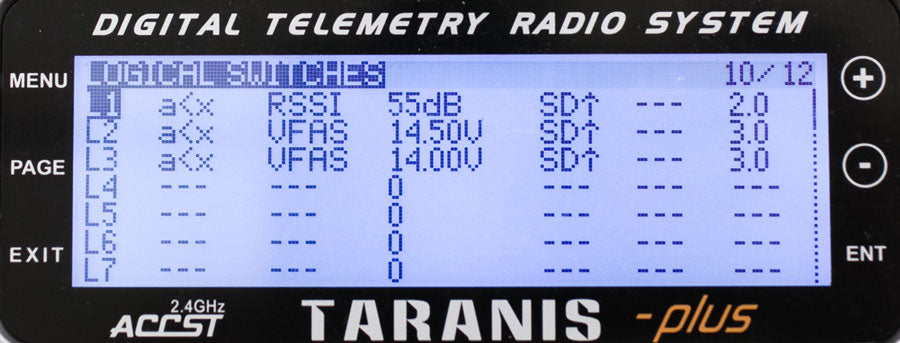
The rest of these screens are how I have the Taranis set. See part 2 of the QAV-X build for an explanation of the screens.
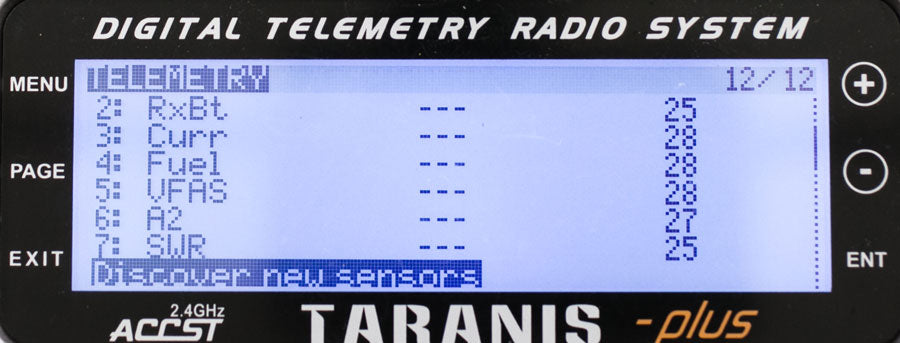
If you don’t see Vfas or RSSI you many need to do an extra step. On this Taranis firmware 2.1.8, bind the XSR to the Taranis with the battery plugged in, go to page 12/12 and hit Discover new sensors.
KISS FC Setup
Next see this KISS fc setup post on how to get the KISS configurator and flash the KISS with the latest firmware.
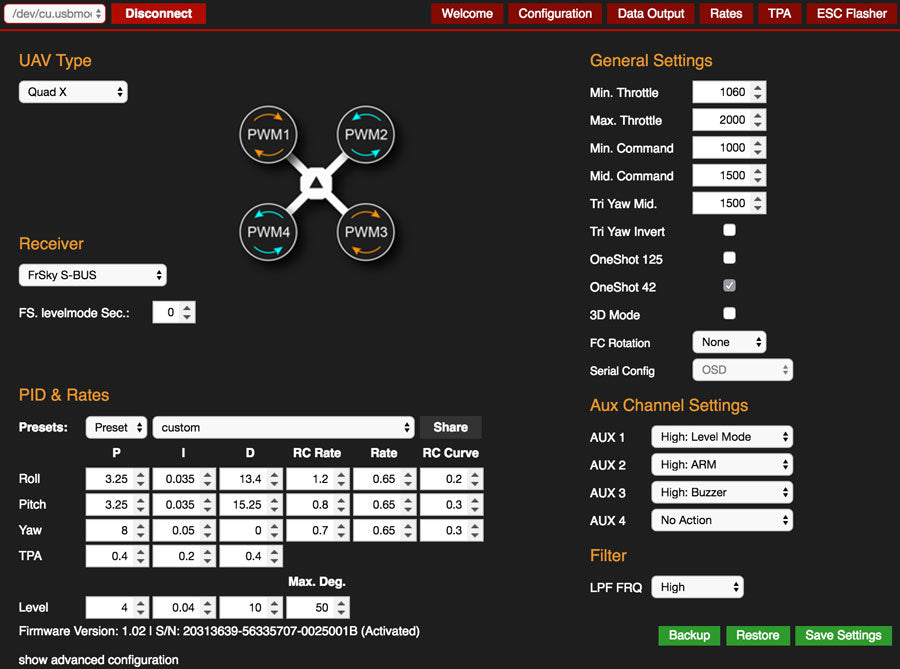
The PIDs here are tuned for this Armattan SCX200 running the KISS 24A esc and EMAX RS2205-S 2300kv motors. You can adjust the rates to your liking. If you want a smoother flight, lower the rates. If you want a twitchy cracked out quad, crank up the rates.
Watch the the video HERE on how to test the motors in the KISS configurator. Since we are using the KISS fc with KISS ESC, ESC calibration is not needed. Make sure the correct motors are spinning for the correct outputs and that they are spinning the correct direction.
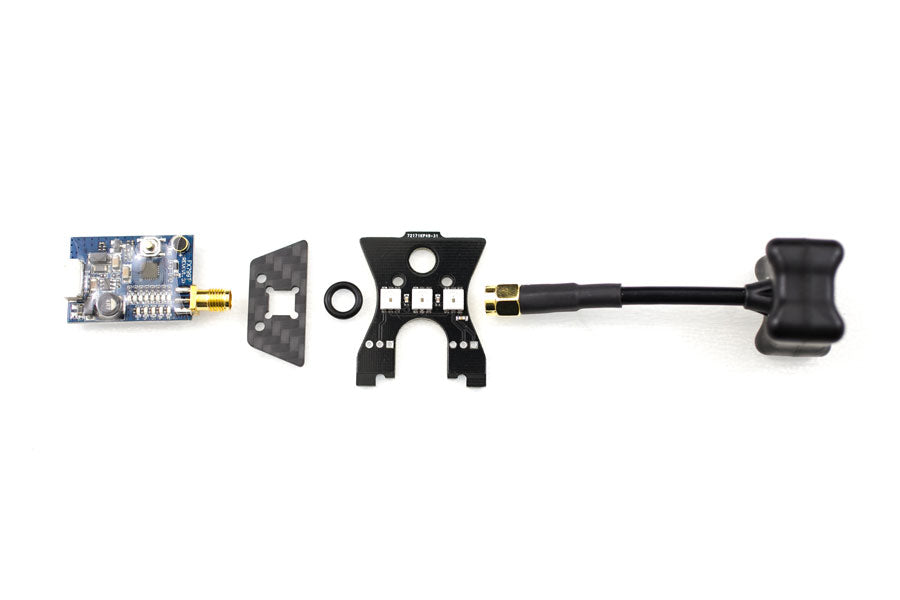
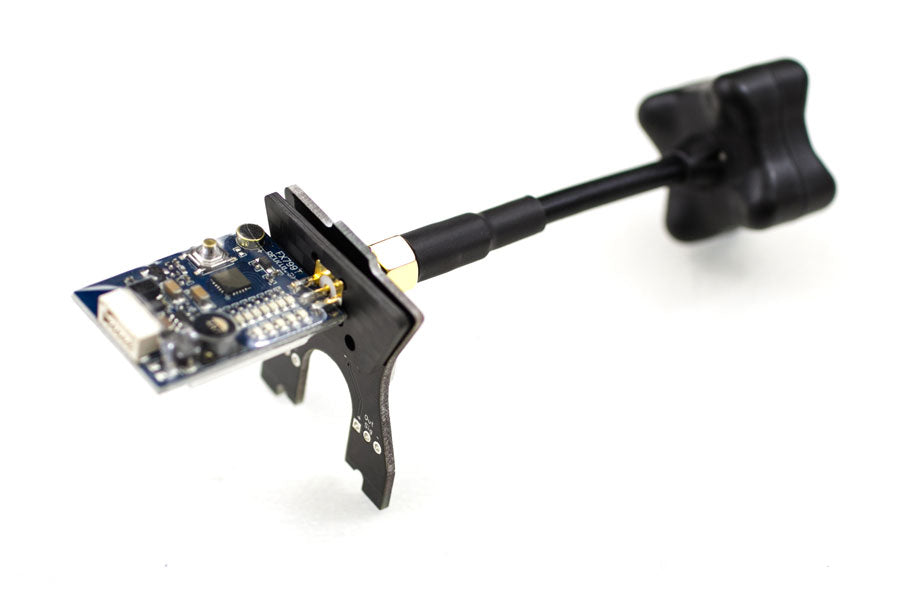
Finishing the Build
The SCX200 has a really smart way for mounting the VTX. It uses a small carbon fiber plate, o-ring and rear plate to lock in the SMA. Place the SMA into the square hole of the carbon fiber plate with the longer side facing up. The slide on the o-ring and put the SMA through the back LED plate. When you screw on the antenna it will lock the SMA in place and take the impact off the solder joint.
Conclusion


The all up weight of the SCX200 is only 300g without battery or GoPro. Compared to the QAV-X which is 340g and the Alien 5″ is 405g, the SCX200 is a one of the best quadcopters for racing. A 40g weight reduction is huge for such a small quad. You really feel the weight difference when you punch the throttle or whipping through the turns.
The SCX200 feels really good in the turns. It’s very balanced and has plenty of punch. There were times where I found myself going much faster than normally fly. There’s something about this quadcopter that makes you want to push it harder and harder. It’s like a good controlled chaos. The SCX200 is one of the best quadcopters for racing. I highly recommend it!
If you found this post helpful, it would be super cool if you purchased the components from my store or purchase items from my Amazon links. These posts are expensive and take a loooong time to make! The purchases make it possible for me to keep making them. Thanks in advance, I greatly appreciate it 🙂