
Quadcopter Basics
When I first wanted to get into quadcopters I had no clue where to start. I have a degree in electronics engineering but all this talk of kv, PIDs, flight controllers sounded alien to me. There is a big learning curve when you start so here is a simple breakdown of the basic parts of a quadcopter to get you started.
Like many beginners wanting to get into FPV quadcopter racing but didn’t know where to start, I just search what everyone else was flying and I bought it. In my case it was the Luminier QAV250 from getfpv.com. They were smart by listing all the Luminier branded components for people like me who didn’t know what to buy. I figured if they recommended the parts it’s gotta work with the frame. Yes all the parts they list work together and flies well but it’s way overpriced. You’ll be paying about 50% more for the Luminier branded parts vs other parts with similar specs. Remember it’s not just the initial investment into your mini quad, you’ll have to buy replacement parts when you crash.
For example, if you buy the recommended Luminier FXC1806 23OOkv, they are $35 each or $140 a set. Everytime you crash and smash one it’s $35 to replace. This motor is pretty much a Luminier branded Tiger MN1806 2300kv which runs $26 each or $104 a set. Or if you go with the suggested Luminier 12 amp ESC, $17 each or $68 a set with SimonK firmware but only handles 2-3 cell batteries. Afro 12 amp ESC’s, $10 each or $40 a set, have similar or better specs, can handle 2-4s batteries, run the same SimonK firmware and can be flashed with BLHeli firmware so you can use Oneshot.
Take some time to research the parts, it will save you a lot of money in the long run. Higher prices doesn’t always mean it’s the best.
Frame
This one is pretty simple, the frame is like the skeleton of your quad. The frame is where you install all your equipment to make the quadcopter. A lot of times when you see a model name, the number listed denotes the size of the quad. The size is measured in mm from motor shaft to shaft diagonally.
Beginner tip: Start off with a lower priced frame for your first one such as the Nighthawk 250 or ZMR250. They can be purchased for around $40. The reason for this is because when you start learning to fly, you will crash for sure. I made the mistake of buying a Luminer QAV250 for my first frame. It’s a great frame but it’s expensive primarily because it doesn’t have replaceable arms. If you break an arm you have to replace the entire bottom plate which runs $45 for the G10 version and $55 for the Carbon fiber frame. If you break a arm on the Nighthawk or ZMR250 replacement arms are about $5. You can always move your electronics to a more expensive frame once you learn to fly.
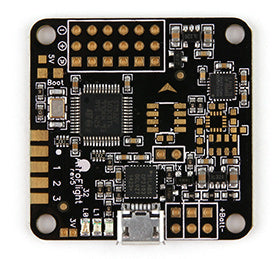
Flight Controller (FC)
The flight controller is the brain of the quad. It usually looks like a small circuit board and has sensors such as a gyroscope and accelerometer. It uses these two sensors to calculate which motor to spin and how much to control the movement of the quadcopter. The Naze32 is the most popular board for many reasons. It supports up to 6 motors, telemetry, battery voltage monitoring, output for discovery/low battery buzzer and only costs about $25.
A lot of people just starting out want GPS with the RTH (return to home) feature on their mini quads, including me, but you really don’t need it. Not only will it make your quad overweight, once you learn how to fly, a Naza with GPS will feel like it’s flying through molasses. Naza flight controllers are great but not for a racing mini quad.
Beginner tip: The Naze32 and CC3D are the most popular boards for mini quadcopters. The Naza is good but is big, heavy and a bit overkill for a small racing quad.
Motors

Mini quads use brushless motors and you will usually see two numbers. The first one tells you the size of the motor, diameter and length. The other number tells you the motor speed. Motors are measured in KV, meaning how many rpm per volt of electricity with no load. The higher the KV the faster the motor will spin and smaller the prop. Lower KV motors are made to spin bigger props. So an 1806 2300kv motor means it has an 18mm diameter and 6mm length and spins 2300 rpm per volt with no load.
*Thurst values are tested with 3s batteries and 5030 and 6030 propellers.
Beginner tip: Most 250mm quadcopters use 5″ props and 2300 KV motors.
ESC (electronic speed controllers)
ESC’s take a signal from the flight controller and power the motors. Each motor needs it’s own ESC so quadcopters have 4 ESCs, hexacoptors need 6 ESCs and so on. ESC’s are rated by A (amps). In general, this is the amount of load they can withstand continuously without melting down. A 12A ESC can easily handle a 2300kv motor running 5″ props.
Tip: When starting out, look for ESC’s that are preflashed with SimonK firmware. Most 250mm quadcopters use 12A ESC’s.
Propellers
These come in nylon, carbon fiber or a mix of both. The most common props for a 250mm quad are 5030. The “50” is the length of the prop and “30” is the pitch of the blades. So a 5030 propeller is 5 inches with a pitch of 3. For more thrust you can go with 5040 or 6030 if your motors and frame can accommodate it. Gemfan and HQProps 5030 are the most popular.
Radio Receiver and Transmitter

Quadcopters require a transmitter and receiver that has a minimum of 4 channels for throttle, pitch, roll and yaw. A good transmitter and receiver combo would have at least 6 channels so you can have selectable flight modes, a discovery buzzer and has failsafe options. Failsafe is a feature where you tell the quadcopter what to do when you lose the transmitter signal or it flies out of range. If there isn’t a failsafe setup, the quadcopter could lose signal and fly away to never return or worse fly into someone.
The FrSky 2.4GHz TARANIS X9D ($200) and D4R-ii ($21) is probably the most popular transmitter and receiver combo for racing mini quads. Yes it is a bit expensive but the X9D could be the last and only transmitter you’ll ever need to buy. This tx and rx combo supports up to 8 channels (in CPPM mode), RSSI (radio signal strength indicator) alarm, telemetry (RSSI and individual flight battery cell levels), failsafe, PPM output (lets you connect just one wire from the rx to flight controller instead of 4) and is fully programmable. You can program the X9D to talk to you!
Battery

LiPo batteries have 3 factors, “mAh” (capacity), “s” (number of cells) and “c” (discharge rate). A 3s, 1300mAh, 45c LiPo battery means it has 3 cells 11.1v (each cell is about 3.7v), 1300 milliamp hour capacity (amount of current a battery can deliver in one hour) and a discharge rate of 45c. In general the c rating is how fast you can discharge (use) the battery without harming it. Higher the c rating, the better it’s suited for hard flying such as racing or acrobatics but they are more expensive. Think of it as like horsepower for a battery. The most common batteries are 3s, 1000 – 1800mah LiPo and about 30c.
There are so many different types of batteries I’ll just focus on the most popular 1300mAh varieties in the chart below.
This part is the game changer. FPV (first person view) is what has made R/C flying so exciting. Flying models have been around for a long time. Now instead of controlling a flying model and just watching it from the ground, FPV show’s you what it looks like flying inside the quad. How cool is that?
Adding FPV to a racing mini quad consists of three main parts: onboard camera, onboard video transmitter and a receiver monitor or goggles. There are endless options and upgrades you to do to the FPV system but we’ll keep things to the basics right now.
Camera

Most FPV cameras use security and video surveillance due to the size and low light capabilities. There are two main types of FPV video cameras, CMOS and CCD. CCD is generally better suited for FPV because they are more tolerant to the constant bright/dark light changing conditions. They handle low light better and are less susceptible to image wobble or “jello” vs a CMOS based sensor.
Camera definition is shown as TVL (TV lines of resolution). A camera between 500 – 700 TVL would be fine for FPV. Anything more than that would be overkill. As of right now video transmitters and goggles can’t show more resolution than that.
GoPro’s and Mobius cameras can be used for FPV but it’s generally not a good idea for racing mini quads because there is a slight delay in the video feed. If you are flying through the woods, because of the delay, you could smash into a tree before you can react. Most mini quads use a dedicated FPV camera for flying and a GoPro or Mobius for HD filming.
The Sony PZ0420 Super HAD CCD 600TVL $55 is probably the most popular and commonly used FPV video camera.
Transmitter
The most popular frequency for FPV is 5.8GHz. It’s easy to set up, has good range, uses a small antenna and doesn’t interfere with 2.4GHz transmitters such as the Taranis X9D. The ImmersionRC 600mW 5.8GHz is the most popular transmitter. Paired with a good circular polarized antenna, it will give you a range of over 1000m (.6 miles).
Monitor/Goggles

FPV flying with monitors vs goggles both have their advantage and disadvantages. Monitors are easier for beginners because you can look up and fly LOS (line of sight) if you need to. Goggles are best for the full FPV immersion experience but it’s a strange sensation when you first start out. It’s best to sit while flying with goggles otherwise you’ll look like a rubber ducky floating in the ocean. I still lean all over the place when I fly.
When choosing a monitor or goggles make sure the receiver is compatible with your transmitter. ImmersionRC’s 600mW 5.8GHz is compatible with all Fatshark receivers.
* requires external receiver module
** includes camera and video transmitter
So there you go, these are the basic components that make up a FPV mini racing quadcopter. If you wanted to build your own mini quad, you could choose a part from each section of this post and everything would work great. The only thing you have to be careful of is choosing the size of your props. Make sure the frame you choose can accommodate 6″ props and the esc can handle the extra load. Take some time and research your parts first. It will save you a lot of money in the long run.
Check back soon and I’ll show you step by step how to build, program and tune a racing mini quad.
If you found this post helpful and want to support the site, you can make your Amazon purchases through the links on this site or with this Amazon link. It won’t cost you anything extra. Thanks in advance, I really appreciate it 🙂