Neutron-R Build Part 2
Neutron-R Build Part 2
In part 1 of the Neutron-R build, we did all the physical build. Part 2 will be the setup.
Parts used in this Build
- Neutron-R 5″ Hybrid
- Aikon AK32 20x20mm ESC
- Talon F7 Fusion with pit switch
- Foxeer Micro Pro camera
- TBS Unify PRO32 vtx
- TBS Crossfire Nano
- TBS Immortal-T antenna
- Foxeer Lollipop Stubby
- Lumenier XILO 2205 1750KV POPO pro
- Pulse 6s 1050mah
- GemFan 5149
Optional Parts
The parts listed here are not required but will make the build easier and cleaner.
- Neutron-R Crossfire antenna mount
- 20×20 half VTX plate
- 8mm Capacitor Holder
- Airbender Turtle stick
- Gorilla Glue Mounting tape
A build kit is available for anyone that is interested in replicating this build easily. It includes all the miscellaneous parts needed for the post.
BetaFlight Setup
I’ve been waiting to post this because there was suppose to be a new firmware that fixes the motor 4 not working. It’s still not available but it’s an easy fix.
First bind the Crossfire Nano to the Crossfire TX. Refer to the PROton long range post for instructions on how to bind the rx.
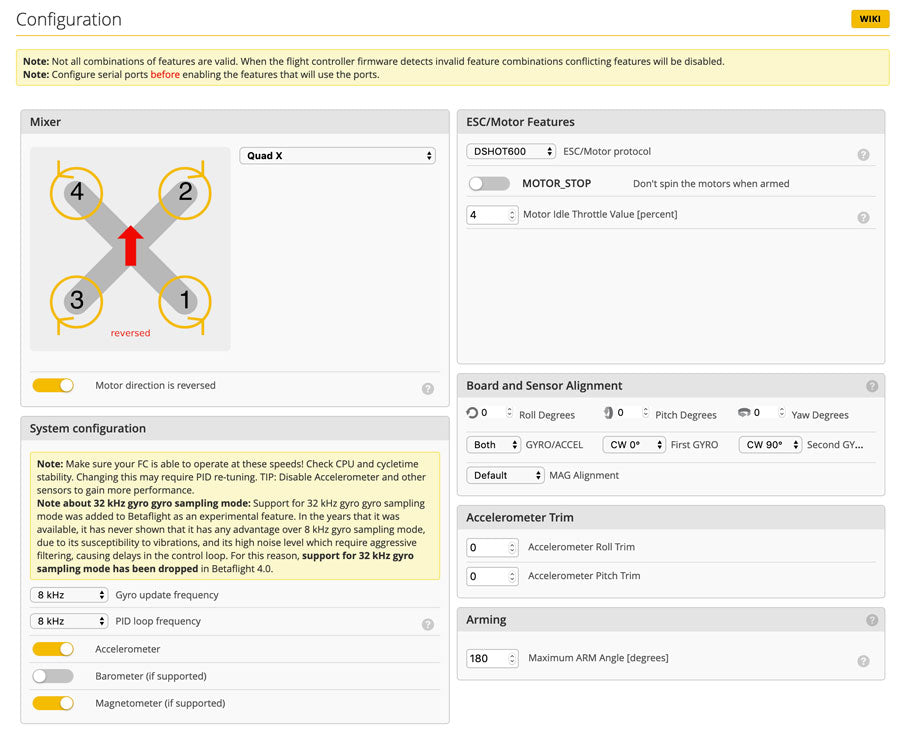
Select Serial Rx for UART3 cause the crossfire is wired up to TX3/RX3.


On the power tab I had to change the scale to 158 for the voltage to read correctly for a 6s battery

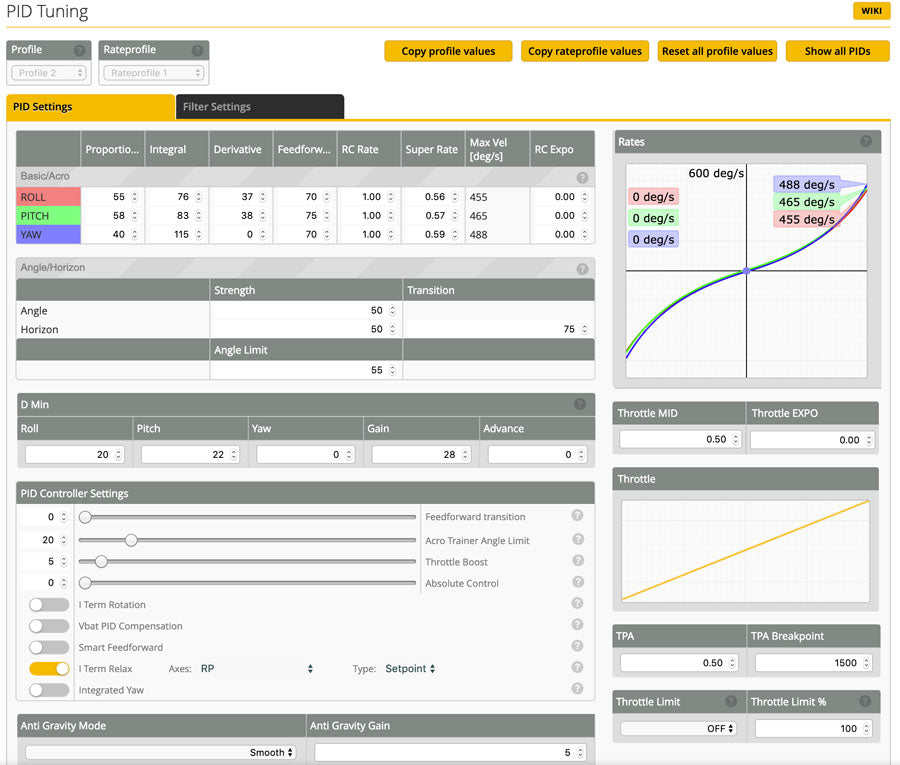
PIDs
BetaFlight is so good now that you can pretty much fly on stock pids and your quad will do great. But you can tweak the filters to squeeze some extra performance. CaptainVanover helped me fine tune the filtering to get it dialed in.


With the current Betaflight 4.0.5, when you go to the motors tab, motor 4 will not work. Easy fix in CLI commands. Type these commands exactly in the CLI without the parenthesis.
- “Resource MOTOR 6 None” – enter
- “Resource MOTOR 4 C08” – enter
- “save” – enter
The rest of the BetaFlight tabs are pretty self explanatory.
Best Quadcopter Build yet?
Equipment and software is so freaking good now. Just a year ago to get a quad that flies this good and super reliable is rare. It took countless hours to fix weird oscillations and get a quad lock in with PIDs. Now, you can pretty much build a quad at the field and race it.
One of our pilots from Germany Vilano did that at IO. I brought him the PROton-R frames to IO. He swapped out his whole fleet and ended up placing 7th out of 190 pilots.
This Neutron-R build for me is the best quad in terms of flight performance, durability and reliability I’ve ever built. Everything just works. Sometimes the difference between a great quad and a so so quad is that if it flies or not. This Neutron-R quadcopter build hasn’t let me down yet.
If you found this post helpful, it would be super cool if you purchased the components from my store or purchase items from my Amazon links. These posts are expensive and take a loooong time to make so the purchases make it possible for me to keep making them. Thanks in advance, I greatly appreciate it 🙂