OSDoge 1.5 Review and Install
OSDoge 1.5
Yes! My favorite component, maybe of all time, the OSDoge has been updated to OSDoge 1.5. There isn’t a big enough change to call it 2 but the upgrades are all options we all want.
Highlight of the OSDoge 1.5 Updates
- USB now lines up with the Naze32 rev6
- No more big capacitor that always falls off
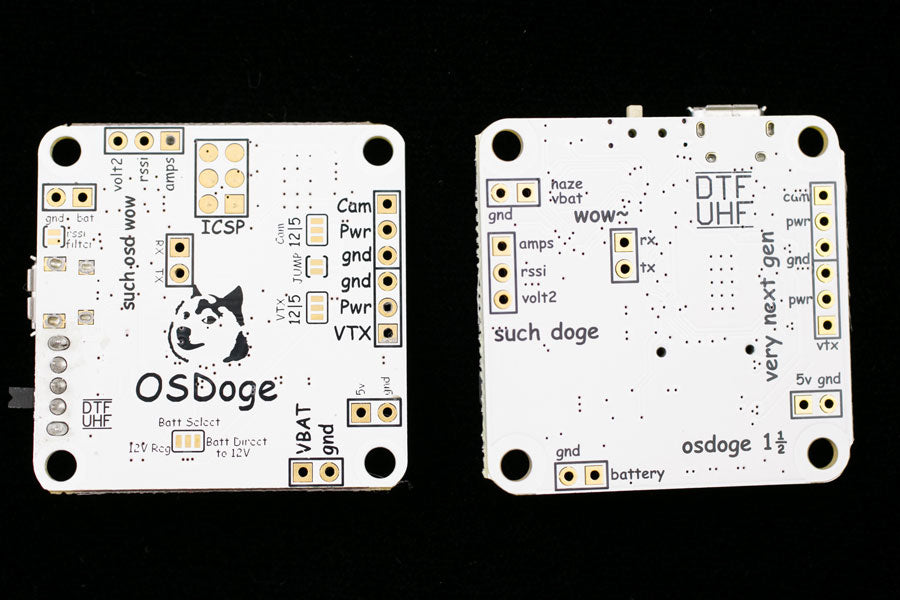
- Idiot light – on the original board if you connect VBAT backwards it will instantly kill the board. I can’t tell you how many boards I’ve fried doing this. On the OSDoge 1.5 if you connect VBAT backwards the LED turns red instead of blue and no magic smoke!
- LED for video and camera signal.
- Comes with MWOSD 1.6
The new OSDoge 1.5 is running MWOSD 1.6. This version has a ton of new features. See the all the features here. These are just some of the highlights:
- Supports BetaFlight – now you can actually change PIDs and save them. MWOSD 1.5 wouldn’t let you save changes to PIDs done through OSD
- AIRMODE display indicator
- Quadrupled RSSI sensitivity
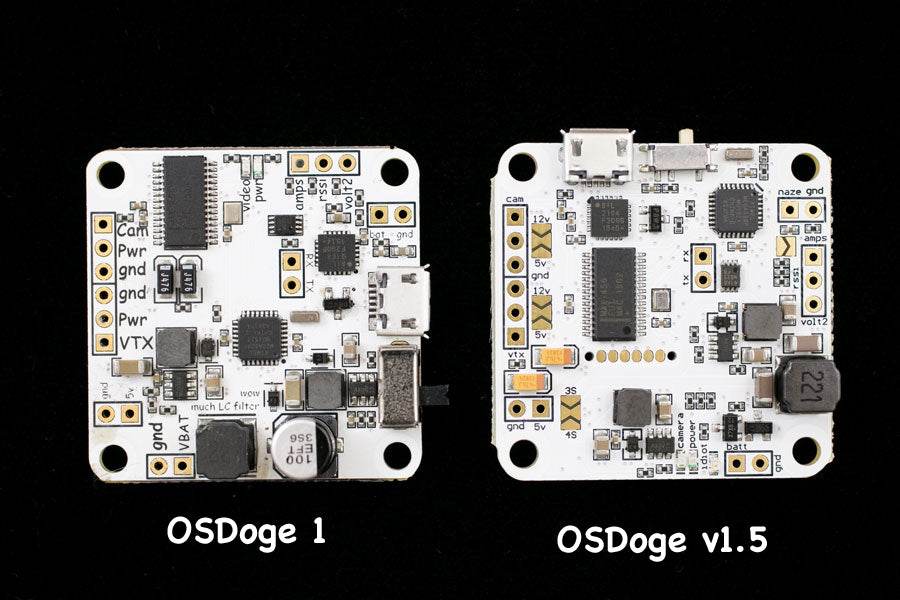
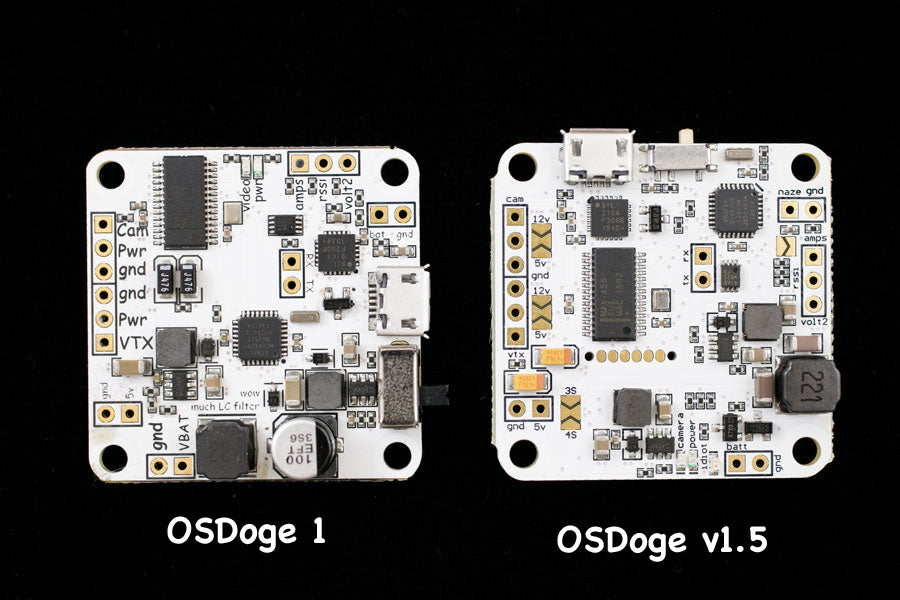
So looking at the two boards the most obvious physical differences is that the big silver capacitor has been removed. This is a very good upgrade. Nearly all my OSDoge boards on my quads are missing this part. The quad will still fly but you will see more noise in the video. Also if you run 4s it will make your VTX emit a high pitch squeal. Annoying but harmless.
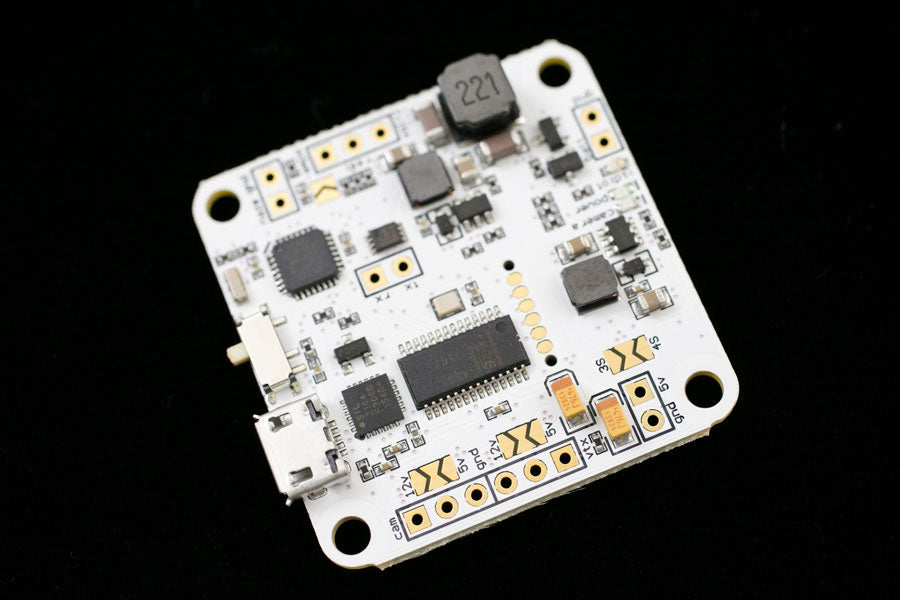
The USB port has been moved to match up with the Naze32 rev6. Now all the jumpers have been moved to the top of the board, vs the bottom on the old board. They are now triangular instead of the 3 tiny rectangles. The triangular jumpers are easier to solder.
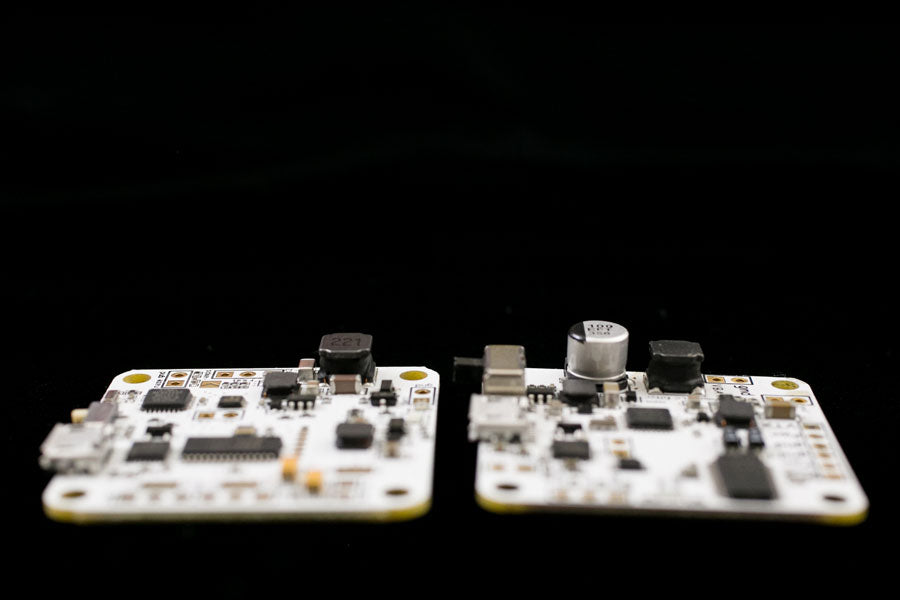
The new board is thinner, 5.5mm vs 7.3mm.
Installing the OSDoge 1.5
Rather than get into the step by step on how to install and use it, I’ll focus on the differences on the the new board. I’ve already done two posts on how to install the OSDoge and OSDoge update.
For the software part is everything is the same as the two other posts I did except you have to download MWOSD 1.6 instead of 1.5.

So the only thing different in MWOSD 1.6 is the RSSI setup. On MWOSD 1.5 the settings were 0 RSSI min and 255 RSSI max. In MWOSD 1.6 the RSSI min is 0 but the RSSI max goes to 1023.
To calibrate the RSSI, set the min to 0 and max to 1023. Then use the OSD menu to adjust RSSI max until it matches the RSSI from your Taranis. To enter the OSD menu, with your quad disarmed, move the sticks YAW right, PITCH up. Watch the video above.
To see RSSI on your Taranis, once you have your Taranis setup for RSSI, from the main menu, press and hold page down, that will bring you to the telemetry screen. The actual RSSI will be displayed there.
The stacking pins are all the same. Once the pins stack with the Naze32 the USB ports are now both lined up. One thing to pay attention to are the jumper settings for the camera and VTX. If you have the right angle header pointing inside, make sure to set the jumpers before you put on the header. Once the header is on it makes getting to the jumpers much harder.
OSDoge 1.5 plays with other flight controllers
I’ve been getting a lot of questions about if the OSDoge 1.5 works with other flight controllers and the answer is yes! Physically the OSDoge is designed for the Naze32 but as long as you connect all the necessary connections, everything works the same.
For example: to use the OSDoge with a Lumenier LUX flight controller, all you have to do is plug the OSDoge to the battery and the TX/RX to the RX/TX on the flight controller. The battery connection will power your camera and VTX. The OSD info will come from the RX/TX from the flight controller. From there you can tune your PIDs, get RSSI, battery voltage and all the other good stuff.
I keep one setup like this for when I use a flight controller other than the Naze32, I use it to tune PIDs.
If you found this post helpful, it would be super cool if you purchased the components from my store or purchase items from my Amazon links. These posts are expensive and take a loooong time to make especially this one! Some of the segments in the video I had to reshoot 3-4 times because CleanFlight was messing up my screen recording and making the separate audio tracks not sync up. The purchases make it possible for me to keep making them. Thanks in advance, I greatly appreciate it 🙂